ISSN 1671-3710
CN 11-4766/R
主办:中国科学院心理研究所
出版:科学出版社
CN 11-4766/R
主办:中国科学院心理研究所
出版:科学出版社
心理科学进展 ›› 2025, Vol. 33 ›› Issue (4): 673-679.doi: 10.3724/SP.J.1042.2025.0673 cstr: 32111.14.2025.0673
黄雷1, 张军恒1, 姬鸣1,2( )
)
收稿日期:2024-04-08
出版日期:2025-04-15
发布日期:2025-03-05
通讯作者:
姬鸣, E-mail: jiming@snnu.edu.cn基金资助:
HUANG Lei1, ZHANG Junheng1, JI Ming1,2()
Received:2024-04-08
Online:2025-04-15
Published:2025-03-05
摘要:
视觉线索受限环境中, 视觉线索模糊和视野狭窄等因素会降低个体导航效能。认知地图凭借其灵活性和预览性的特点为导航提供支持, 保证导航过程的连续性和准确性。研究分析了认知地图的构成要素及相关理论基础, 提出了认知地图的构建和更新−校正两阶段动态加工机制及其对视觉线索受限环境中空间导航行为的影响。在构建阶段, 个体通过多感官通道获取并整合空间信息形成认知地图; 在更新−校正阶段, 个体更新并校正空间心智模型和空间定向以实现空间导航, 并全程受到元认知监控的调节。认知地图的动态加工机制厘清了推理、语言、元认知等认知加工过程如何支持视觉线索受限等环境中的空间导航行为, 为未来探索空间导航能力训练、人机协同导航智能化等方面提供理论基础。
中图分类号:
黄雷, 张军恒, 姬鸣. (2025). 视觉线索受限环境导航中认知地图的动态加工机制. 心理科学进展 , 33(4), 673-679.
HUANG Lei, ZHANG Junheng, JI Ming. (2025). Dynamic processing mechanisms of cognitive maps in navigation in visually cue-restricted environments. Advances in Psychological Science, 33(4), 673-679.

图1 认知地图构成要素文献桑基图
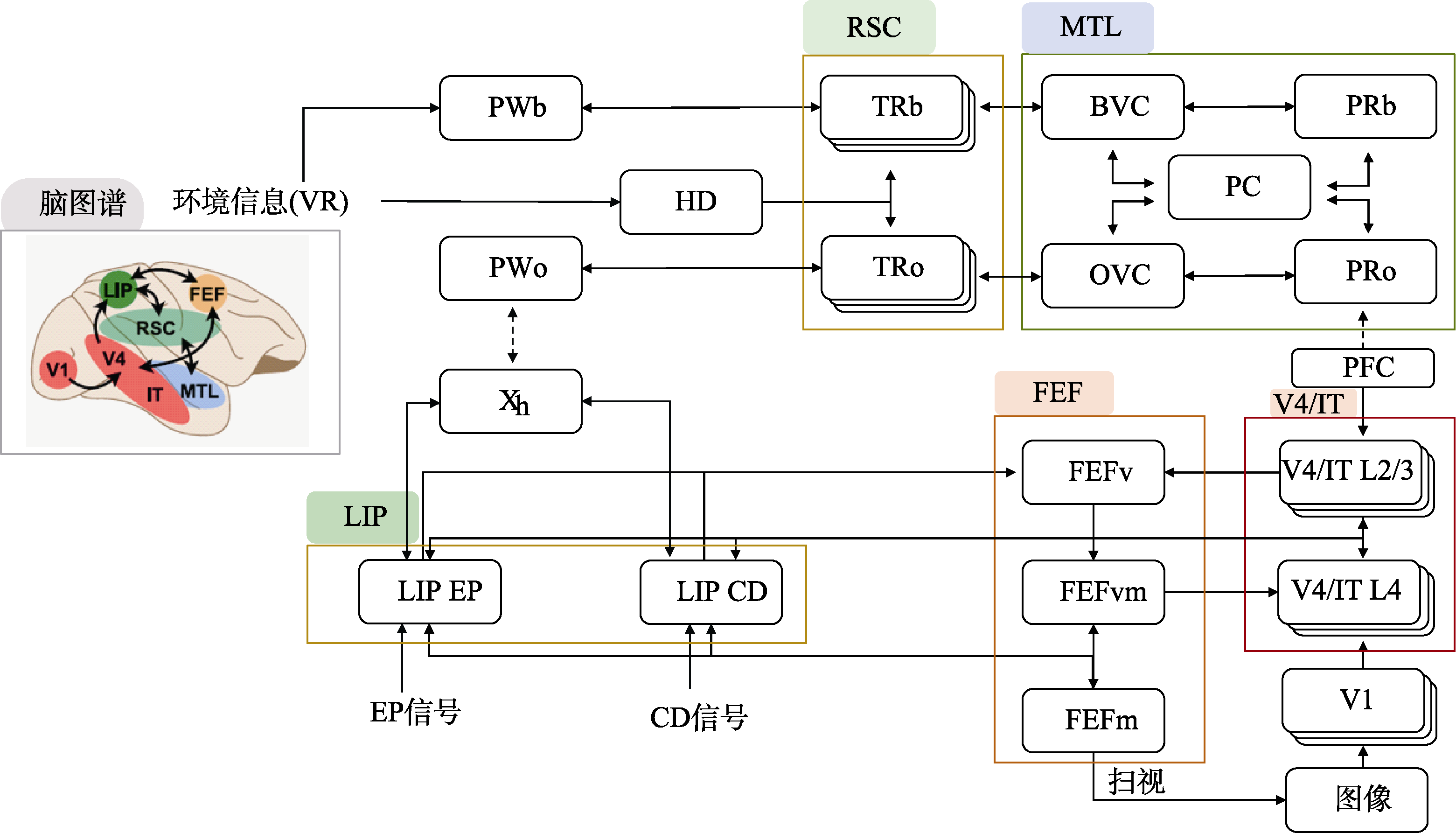
图2 Spacecog大尺度空间认知神经计算模型 注:图片改编自Burkhardt等(2023)。详解见网络版附录。
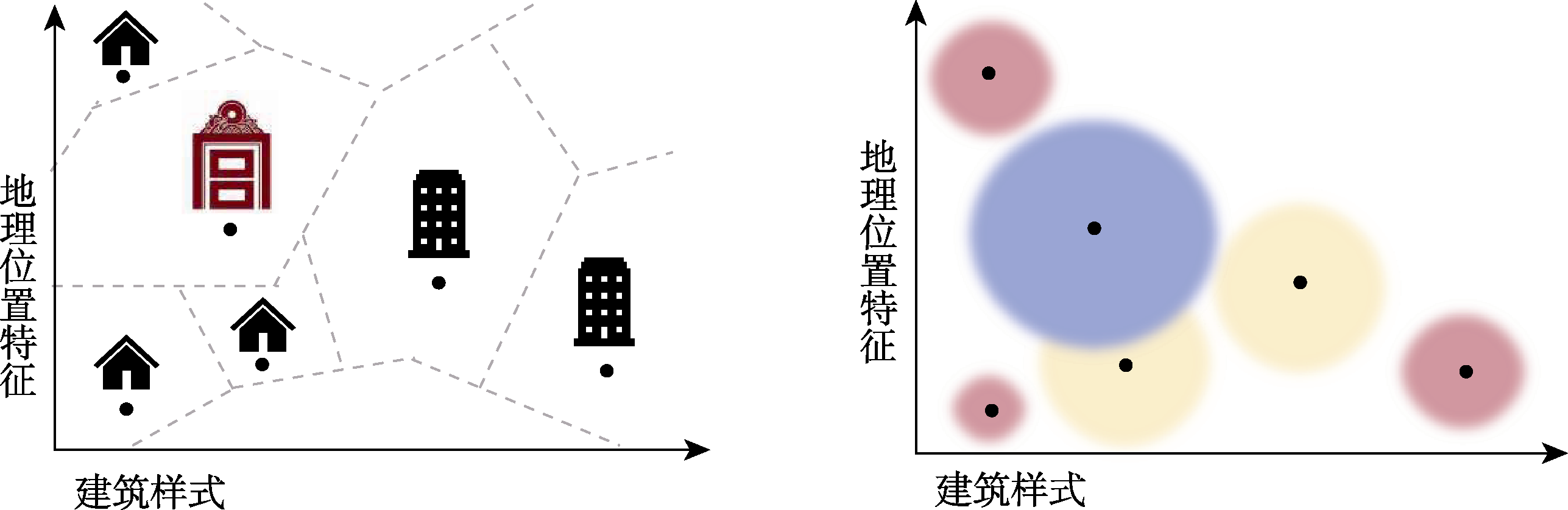
图3 cognitive space模型示例图 注:“以故宫为例, (A)认知空间由建筑样式(横轴)和地理位置特征(横轴)两个维度构成。沿这两个轴的特征值定义故宫, 具有相似特性的属性位于彼此附近。建筑样式(建筑图标)被定义为认知空间的凸区域, 使用具有欧式度量的连续空间的Voronoi镶嵌将空间离散化为凸区域, 不同属性(黑点)间的距离通过基于特征维度上的相异性决定。(B)右图:彩色圆圈代表概念所涵盖的空间的大小, 核心概念位于中心位置, 在认知空间中面积的所占比例较大。相似刺激位于距离核心概念较近的位置, 不相似的刺激位于核心概念较远的位置。圆圈面积也随距离的增大而减小。图片改编自Bellmund等(2018)。
| 要素组织形式 | 概念 | 来源 | 表征内容 |
|---|---|---|---|
| 认知地图 | 依赖重要线索构建出的独立于自身而存在的环境全景地图 | Tolman, | 空间环境信息的物理表征 |
| 认知图谱 | 是对空间环境的灵活表征, 它允许个体在导航过程中理解和记忆路线网络 | Chrastil & Warren, | 仅包含节点和链接的动作序列集合 |
| 认知空间 | 由刺激的物理特征(如位置、方向)和抽象特征(如颜色、形状)的多组质量维度构成的空间表征形式 | Bellmund et al., | 反映知识层次或嵌套概念的多尺度表征 |
表1 构成要素组织形式的相关概念
| 要素组织形式 | 概念 | 来源 | 表征内容 |
|---|---|---|---|
| 认知地图 | 依赖重要线索构建出的独立于自身而存在的环境全景地图 | Tolman, | 空间环境信息的物理表征 |
| 认知图谱 | 是对空间环境的灵活表征, 它允许个体在导航过程中理解和记忆路线网络 | Chrastil & Warren, | 仅包含节点和链接的动作序列集合 |
| 认知空间 | 由刺激的物理特征(如位置、方向)和抽象特征(如颜色、形状)的多组质量维度构成的空间表征形式 | Bellmund et al., | 反映知识层次或嵌套概念的多尺度表征 |
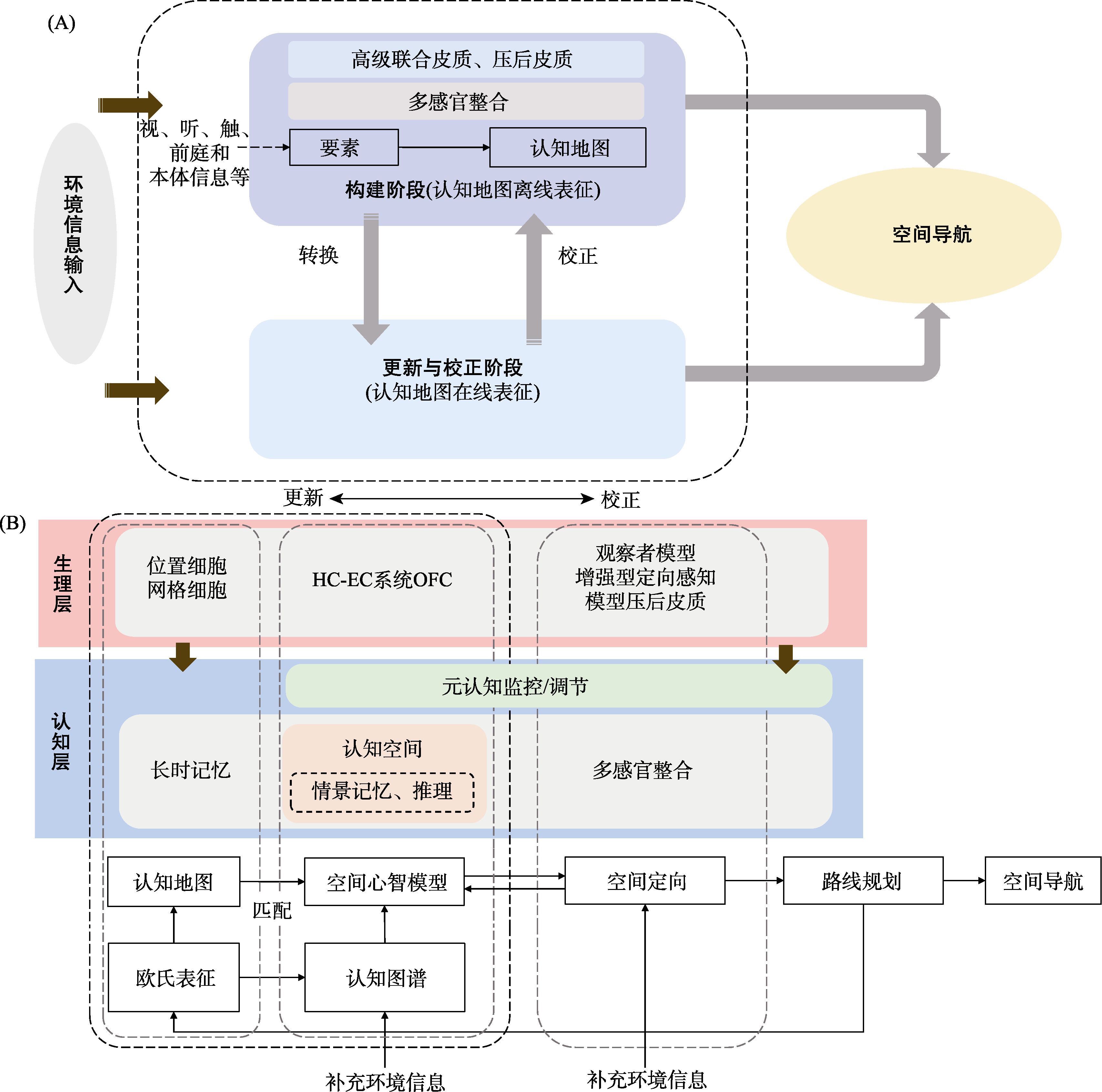
图4 认知地图在视觉线索受限环境中的认知加工机制示意图 注:(A)认知地图的两阶段加工论;(B)认知地图在更新−校正阶段中的认知加工过程。
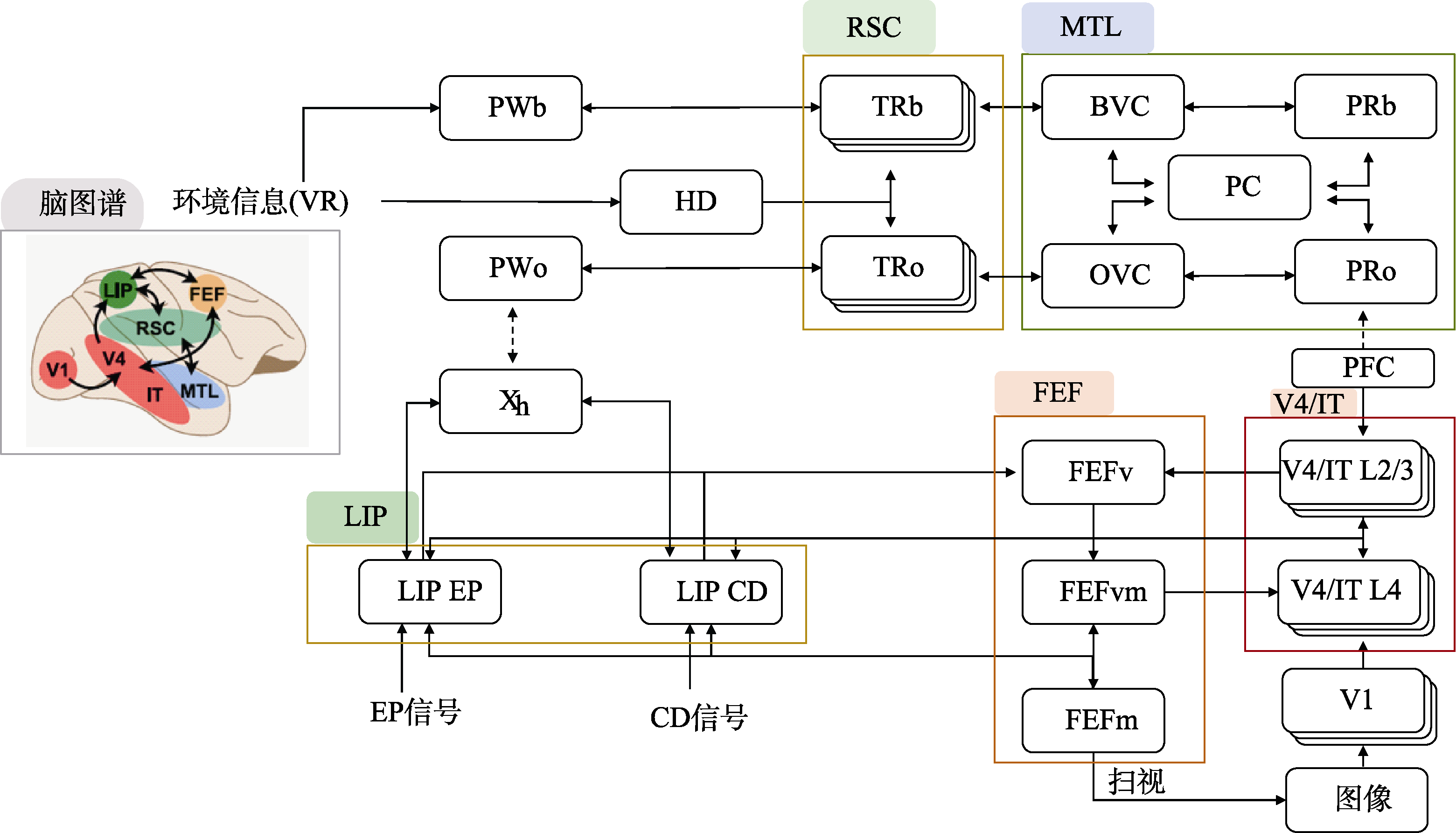
图2 Spacecog大尺度空间认知神经计算模型
| [1] |
李丹, 杨昭宁. (2015). 空间导航:路标学习和路径整合的关系. 心理科学进展, 23(10), 1755-1762.
doi: 10.3724/SP.J.1042.2015.01755 |
| [2] |
吴文雅, 王亮. (2023). 认知地图及其内在机制. 心理科学进展, 31(10), 1856-1782.
doi: 10.3724/SP.J.1042.2023.01856 |
| [3] | 肖承丽, 刘传军. (2014). 对想象环境的空间更新. 心理学报, 46(9), 1289-1300. |
| [4] | 游旭群. (2017). 飞行空间定向. 见游旭群(编), 航空心理学——理论、实践与应用 (pp.20-61). 杭州: 浙江教育出版社. |
| [5] | 郑丽, 王玲, 杨佳佳, 郑晨光. (2023). 阿尔茨海默病转基因动物认知地图损伤的细胞-网络机制. 生理学报, 75(5), 1-23. |
| [6] | Anastasiou, C., Baumann, O., & Yamamoto, N. (2023). Does path integration contribute to human navigation in large-scale space. Psychonomic Bulletin & Review, 30(3), 822-842. |
| [7] | Antony, J. W., & Bennion, K. A. (2023). Semantic associates create retroactive interference on an independent spatial memory task. Journal of Experimental Psychology: Learning Memory and Cognition, 49(5), 701-713. |
| [8] |
Baraduc, P., Duhamel, J. R., & Wirth, S. (2019). Schema cells in the macaque hippocampus. Science, 363(6427), 635-639.
doi: 10.1126/science.aav5404 pmid: 30733419 |
| [9] | Barhorst-Cates, E. M., Rand, K. M., & Creem-Regehr, S. H. (2016). The effects of restricted peripheral field-of-view on spatial learning while navigating. PloS One, 11(10), e0163785. |
| [10] | Bellmund, J. L., Gärdenfors, P., Moser, E. I., & Doeller, C. F. (2018). Navigating cognition: Spatial codes for human thinking. Science, 362(6415), eaat6766. |
| [11] | Bergelt, J., & Hamker, F. H. (2019). Spatial updating of attention across eye movements: A neuro-computational approach. Journal of Vision, 19(7), 10. |
| [12] | Beuth, F. (2019). Visual attention in primates and for machines- neuronal mechanisms [Unpublised doctoral dissertation]. Chemnitz, Technische Universität Chemnitz, Germany. |
| [13] | Bicanski, A., & Burgess, N. (2018). A neural-level model of spatial memory and imagery. eLife, 7, e33752. |
| [14] |
Bicanski, A., & Burgess, N. (2020). Neuronal vector coding in spatial cognition. Nature Reviews Neuroscience, 21(9), 453-470.
doi: 10.1038/s41583-020-0336-9 pmid: 32764728 |
| [15] |
Bonasia, K., Blommesteyn, J., & Moscovitch, M. (2016). Memory and navigation: Compression of space varies with route length and turns. Hippocampus, 26(1), 9-12.
doi: 10.1002/hipo.22539 pmid: 26418606 |
| [16] | Borodaeva, Z., Winkler, S., Brade, J., Klimant, P., & Jahn, G. (2023). Spatial updating in virtual reality for reproducing object locations in vista space-boundaries, landmarks, and idiothetic cues. Frontiers in Psychology, 14, 1144861. |
| [17] | Brayda, L., Leo, F., Baccelliere, C., Vigini, C., & Cocchi, E. (2019, October). A refreshable tactile display effectively supports cognitive mapping followed by orientation and mobility tasks: A comparative multi-modal study involving blind and low-vision participants. Paper presented at the meeting of Proceedings of the 2nd Workshop on Multimedia for Accessible Human Computer Interfaces (pp. 9-15), New York, NY. |
| [18] |
Brunec, I. K., Javadi, A.-H., Zisch, F. E. L., & Spiers, H. J. (2017). Contracted time and expanded space: The impact of circumnavigation on judgements of space and time. Cognition, 166, 425-432.
doi: S0010-0277(17)30166-X pmid: 28624709 |
| [19] |
Brunec, I. K., Moscovitch, M., & Barense, M. D. (2018). Boundaries shape cognitive representations of spaces and events. Trends in Cognitive Sciences, 22(7), 637-650.
doi: S1364-6613(18)30087-1 pmid: 29706557 |
| [20] | Brunec, I. K., Nantais, M. M., Sutton, J. E., Epstein, R. A., & Newcombe, N. S. (2023). Exploration patterns shape cognitive map learning. Cognition, 233, 105360. |
| [21] | Buckner, R. L. (2010). The role of the hippocampus in prediction and imagination. Annual Review of Psychology, 61(1), 27-48. |
| [22] |
Bulkin, D. A., Sinclair, D. G., Law, L. M., & Smith, D. M. (2020). Hippocampal state transitions at the boundaries between trial epochs. Hippocampus, 30(6), 582-595.
doi: 10.1002/hipo.23180 pmid: 31793687 |
| [23] |
Burkhardt, M., Bergelt, J., Gönner, L., Dinkelbach, H. Ü., Beuth, F., Schwarz, A., ... Hamker, F. H. (2023). A large-scale neurocomputational model of spatial cognition integrating memory with vision. Neural Networks, 167, 473-488.
doi: 10.1016/j.neunet.2023.08.034 pmid: 37688954 |
| [24] |
Chan, E., Baumann, O., Bellgrove, M. A., & Mattingley, J. B. (2014). Negative emotional experiences during navigation enhance parahippocampal activity during recall of place information. Journal of Cognitive Neuroscience, 26(1), 154-164.
doi: 10.1162/jocn_a_00468 pmid: 23984944 |
| [25] | Chen, S., Guhur, P. L., Schmid, C., & Laptev, I. (2021). History aware multimodal transformer for vision-and- language navigation. Advances in Neural Information Processing Systems, 34, 5834-5847. |
| [26] | Chen, S., Guhur, P. L., Tapaswi, M., Schmid, C., & Laptev, I. (2022). Think global, act local: Dual-scale graph transformer for vision-and-language navigation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (pp. 16537-16547). |
| [27] | Cheung, A., Ball, D., Milford, M., Wyeth, G., & Wiles, J. (2012). Maintaining a cognitive map in darkness: The need to fuse boundary knowledge with path integration. PLoS Computational Biology, 8(8), e1002651. |
| [28] | Chrastil, E. R., & Warren, W. H. (2014). From cognitive maps to cognitive graphs. PLoS ONE, 9(11), e112544. |
| [29] | Cornell, E. H., & Bourassa, C. M. (2007). Human non-visual discrimination of gradual turning is poor. Psychological Research, 71(3), 314-321. |
| [30] | Coutrot, A., Manley, E., Goodroe, S., Gahnstrom, C., Filomena, G., Yesiltepe, D., ... Spiers, H. J. (2022). Entropy of city street networks linked to future spatial navigation ability. Nature, 604(7904), 104-110. |
| [31] | Credé, S., Thrash, T., Hölscher, C., & Fabrikant, S. I. (2020). The advantage of globally visible landmarks for spatial learning. Journal of Environmental Psychology, 67, 101369. |
| [32] | Creem-Regehr, S. H., Barhorst-Cates, E. M., Tarampi, M. R., Rand, K. M., & Legge, G. E. (2021). How can basic research on spatial cognition enhance the visual accessibility of architecture for people with low vision. Cognitive Research: Principles and Implications, 6(1), 3. |
| [33] | Doeller, C. F., Barry, C., & Burgess, N. (2010). Evidence for grid cells in a human memory network. Nature, 463(7281), 657-661. |
| [34] |
Eilam, D. (2014). Of mice and men: Building blocks in cognitive mapping. Neuroscience and Biobehavioral Reviews, 47, 393-409.
doi: 10.1016/j.neubiorev.2014.09.010 pmid: 25265515 |
| [35] |
Ekstrom, A. D., & Ranganath, C. (2018). Space, time, and episodic memory: The hippocampus is all over the cognitive map. Hippocampus, 28(9), 680-687.
doi: 10.1002/hipo.22750 pmid: 28609014 |
| [36] | Fernández Velasco, P., & Casati, R. (2020). Subjective disorientation as a metacognitive feeling. Spatial Cognition & Computation, 20(4), 281-305. |
| [37] | Frame, M. E., Schwing, M., Johnston, S., & Curtis, E. (2023). Route planning decisions: Evaluating reliance on spatial heuristics under risk. Spatial Cognition & Computation, 23(1), 57-82. |
| [38] |
Frankenstein, J., Mohler, B. J., Bülthoff, H. H., & Meilinger, T. (2012). Is the map in our head oriented north. Psychological Science, 23(2), 120-125.
doi: 10.1177/0956797611429467 pmid: 22207644 |
| [39] |
Gallistel, C. R. (1989). Animal cognition: The representation of space, time and number. Annual Review of Psychology, 40, 155-189.
pmid: 2648974 |
| [40] | Gao, B., Chen, Z., Chen, X., Tu, H., & Huang, F. (2021). The effects of audiovisual landmarks on spatial learning and recalling for image browsing interface in virtual environments. Journal of Systems Architecture, 117, 102096. |
| [41] | Gardenfors, P. (2004). Conceptual spaces: The geometry of thought. MIT Press. |
| [42] | Gärling, T., Böök, A., Lindberg, E., & Nilsson, T. (1981). Memory for the spatial layout of the everyday physical environment: Factors affecting rate of acquisition. Journal of Environmental Psychology, 1(4), 263-277. |
| [43] | Gramann, K., Hohlefeld, F. U., Gehrke, L., & Klug, M. (2021). Human cortical dynamics during full-body heading changes. Scientific Reports, 11(1), 18186. |
| [44] |
Grillini, A., Renken, R. J., & Cornelissen, F. W. (2019). Attentional modulation of visual spatial integration: Psychophysical evidence supported by population coding modeling. Journal of Cognitive Neuroscience, 31(9), 1329-1342.
doi: 10.1162/jocn_a_01412 pmid: 30990389 |
| [45] | Hafting, T., Fyhn, M., Molden, S., Moser, M. B., & Moser, E. I. (2005). Microstructure of a spatial map in the entorhinal cortex. Nature, 436(7052), 801-806. |
| [46] | Hao, X., Yuan, Z., Lin, S., Kong, X., Song, Y., & Liu, J. (2022). Different behavioral and learning effects between using boundary and landmark cues during spatial navigation. Current Psychology, 42(27), 23301-23312. |
| [47] | Hersh, M. (2020). Mental maps and the use of sensory information by blind and partially sighted people. ACM Transactions on Accessible Computing, 13(2), 1-32. |
| [48] |
Howard, L. R., Javadi, A. H., Yu, Y., Mill, R. D., Morrison, L. C., Knight, R., ... Spiers, H. J. (2014). The hippocampus and entorhinal cortex encode the path and Euclidean distances to goals during navigation. Current Biology, 24(12), 1331-1340.
doi: S0960-9822(14)00526-0 pmid: 24909328 |
| [49] |
Ishikawa, T., & Montello, D. R. (2006). Spatial knowledge acquisition from direct experience in the environment: Individual differences in the development of metric knowledge and the integration of separately learned places. Cognitive Psychology, 52(2), 93-129.
pmid: 16375882 |
| [50] | Ishikawa, T., & Nakamura, U. (2012). Landmark selection in the environment: Relationships with object characteristics and sense of direction. Spatial Cognition & Computation, 12(1), 1-22. |
| [51] | Ishikawa, T., & Zhou, Y. (2020). Improving cognitive mapping by training for people with a poor sense of direction. Cognitive Research: Principles and Implications, 5(1), 1-19. |
| [52] | Jabbari, Y., Kenney, D. M., von Mohrenschildt, M., & Shedden, J. M. (2021). Vestibular cues improve landmark- based route navigation: A simulated driving study. Memory & Cognition, 49(8), 1633-1644. |
| [53] |
Jacobs, J., Weidemann, C. T., Miller, J. F., Solway, A., Burke, J. F., Wei, X. X., ... Kahana, M. J. (2013). Direct recordings of grid-like neuronal activity in human spatial navigation. Nature Neuroscience, 16(9), 1188-1190.
doi: 10.1038/nn.3466 pmid: 23912946 |
| [54] | Kaski, D., Quadir, S., Nigmatullina, Y., Malhotra, P. A., Bronstein, A. M., & Seemungal, B. M. (2016). Temporoparietal encoding of space and time during vestibular-guided orientation. Brain, 139(2), 392-403. |
| [55] | Karim, A. M., Rumalla, K., King, L. A., & Hullar, T. E. (2018). The effect of spatial auditory landmarks on ambulation. Gait & Posture, 60, 171-174. |
| [56] | Keller, A. M., Taylor, H. A., & Brunyé, T. T. (2020). Uncertainty promotes information-seeking actions, but what information. Cognitive Research: Principles and Implications, 5(1), 42. |
| [57] |
Keshavarzi, S., Velez-Fort, M., & Margrie, T. W. (2023). Cortical integration of vestibular and visual cues for navigation, visual processing, and perception. Annual Review of Neuroscience, 46, 301-320.
doi: 10.1146/annurev-neuro-120722-100503 pmid: 37428601 |
| [58] |
Knierim, J. J., & Hamilton, D. A. (2011). Framing spatial cognition: Neural representations of proximal and distal frames of reference and their roles in navigation. Physiological Reviews, 91(4), 1245-1279.
doi: 10.1152/physrev.00021.2010 pmid: 22013211 |
| [59] | Kolarik, A. J., Moore, B. C., Zahorik, P., Cirstea, S., & Pardhan, S. (2016). Auditory distance perception in humans: A review of cues, development, neuronal bases, and effects of sensory loss. Attention, Perception, & Psychophysics, 78( 2), 373-395. |
| [60] | Koriat, A. (1997). Monitoring one's own knowledge during study: A cue-utilization approach to judgments of learning. Journal of Experimental Psychology: General, 126(4), 349-370. |
| [61] | Lanini-Maggi, S., Ruginski, I., & Fabrikant, S. I. (2021). Improving pedestrians' spatial learning during landmark- based navigation with auditory emotional cues and narrative. UC Santa Barbara: Center for Spatial Studies. |
| [62] | Liu, B. Y., Shan, J. Y., & Gu, Y. (2023). Temporal and spatial properties of vestibular signals for perception of self- motion. Frontiers in Neurology, 14, 1266513. |
| [63] | Löwen, H., Krukar, J., & Schwering, A. (2019). Spatial learning with orientation maps: The influence of different environmental features on spatial knowledge acquisition. ISPRS International Journal of Geo-Information, 8(3), 149. |
| [64] | Lu, R., Yu, C., Li, Z., Mou, W., & Li, Z. (2020). Set size effects in spatial updating are independent of the online/ offline updating strategy. Journal of Experimental Psychology: Human Perception and Performance, 46(9), 901-911. |
| [65] | Lynch, K. (1964). The image of the city. MIT Press. |
| [66] |
Macauda, G., Moisa, M., Mast, F. W., Ruff, C. C., Michels, L., & Lenggenhager, B. (2019). Shared neural mechanisms between imagined and perceived egocentric motion - A combined GVS and fMRI study. Cortex, 119, 20-32.
doi: S0010-9452(19)30163-7 pmid: 31071554 |
| [67] | Maguire, E. A., & Mullally, S. L. (2013). The hippocampus: A manifesto for change. Journal of Experimental Psychology: General, 142(4), 1180-1189. |
| [68] | Maidenbaum, S., Miller, J., Stein, J. M., & Jacobs, J. (2018). Grid-like hexadirectional modulation of human entorhinal theta oscillations. Proceedings of the National Academy of Sciences, 115(42), 10798-10803. |
| [69] | Marsh, J. E., Vachon, F., Sörqvist, P., Marsja, E., Röer, J., Richardson, B. H., & Ljungberg, J. K. (2023). Irrelevant changing-state vibrotactile stimuli disrupt verbal serial recall: Implications for theories of interference in short- term memory. Journal of Cognitive Psychology, 36(1), 78-100. |
| [70] |
Martolini, C., Cappagli, G., Luparia, A., Signorini, S., & Gori, M. (2020). The impact of vision loss on allocentric spatial coding. Frontiers in Neuroscience, 14, 565.
doi: 10.3389/fnins.2020.00565 pmid: 32612500 |
| [71] | Mason, L. A., Thomas, A. K., & Taylor, H. A. (2022). On the proposed role of metacognition in environment learning: Recommendations for research. Cognitive Research: Principles and Implications, 7(1), 104. |
| [72] |
Medendorp, W. P., & Selen, L. J. P. (2017). Vestibular contributions to high-level sensorimotor functions. Neuropsychologia, 105, 144-152.
doi: S0028-3932(17)30050-7 pmid: 28163007 |
| [73] |
Meijer, G. T., Montijn, J. S., Pennartz, C. M. A., & Lansink, C. S. (2017). Audiovisual modulation in mouse primary visual cortex depends on cross-modal stimulus configuration and congruency. Journal of Neuroscience, 37(36), 8783-8796.
doi: 10.1523/JNEUROSCI.0468-17.2017 pmid: 28821672 |
| [74] | Meilinger, T., Riecke, B. E., & Bulthoff, H. H. (2014). Local and global reference frames for environmental spaces. Quarterly Journal of Experimental Psychology, 67(3), 542-569. |
| [75] | Meilinger, T., Strickrodt, M., & Bülthoff, H. H. (2018, September). Spatial survey estimation is incremental and relies on directed memory structures. Paper presented at the meeting of Spatial Cognition XI:11th International Conference, Spatial Cognition 2018, Proceedings 11 (pp. 27-42), Tübingen, Germany. |
| [76] |
Meyerhoff, H. S., Huff, M., Papenmeier, F., Jahn, G., & Schwan, S. (2011). Continuous visual cues trigger automatic spatial target updating in dynamic scenes. Cognition, 121(1), 73-82.
doi: 10.1016/j.cognition.2011.06.001 pmid: 21726856 |
| [77] | Mou, W., McNamara, T. P., Rump, B., & Xiao, C. (2006). Roles of egocentric and allocentric spatial representations in locomotion and reorientation. Journal of Experimental Psychology: Learning, Memory, and Cognition, 32(6), 1274. |
| [78] | Nardi, D., Carpenter, S. E., Johnson, S. R., Gilliland, G. A., Melo, V. L., Pugliese, R., ... Kelly, D. M. (2022). Spatial reorientation with a geometric array of auditory cues. Quarterly Journal of Experimental Psychology, 75(2), 362-373. |
| [79] | Nardi, D., Twyman, A. D., Holden, M. P., & Clark, J. M. (2020). Tuning in: Can humans use auditory cues for spatial reorientation. Spatial Cognition & Computation, 20(2), 83-103. |
| [80] | Navratilova, Z., & Mcnaughton, B. L. (2014). Models of path integration in the hippocampal complex. In: DerdikmanD., & KnierimJ. (Eds.), Space, time and memory in the hippocampal formation. Springer, Vienna. |
| [81] |
Noordzij, M. L., Zuidhoek, S., & Postma, A. (2006). The influence of visual experience on the ability to form spatial mental models based on route and survey descriptions. Cognition, 100(2), 321-342.
pmid: 16043169 |
| [82] | Nuhn, E., & Timpf, S. (2018). An overall framework for personalised landmark selection. In: KieferP., HuangH., Van de WegheN., & RaubalM. (Eds.). Progress in Location Based Services 2018. LBS 2018. Lecture Notes in Geoinformation and Cartography. Springer, Cham. |
| [83] | Ottink, L., Buimer, H., van Raalte, B., Doeller, C. F., van der Geest, T. M., & van Wezel, R. J. A. (2022). Cognitive map formation supported by auditory, haptic, and multimodal information in persons with blindness. Neuroscience & Biobehavioral Review, 140, 104797. |
| [84] | Ottink, L., van Raalte, B., Doeller, C. F., Van der Geest, T. M., & Van Wezel, R. J. A. (2022). Cognitive map formation through tactile map navigation in visually impaired and sighted persons. Scientific Reports, 12(1), 11567. |
| [85] |
Park, S. A., Miller, D. S., Nili, H., Ranganath, C., & Boorman, E. D. (2020). Map making: Constructing, combining, and inferring on abstract cognitive maps. Neuron, 107(6), 1226-1238.
doi: S0896-6273(20)30484-0 pmid: 32702288 |
| [86] |
Pasqualotto, A., & Esenkaya, T. (2016). Sensory substitution: The spatial updating of auditory scenes “Mimics” the spatial updating of visual scenes. Frontiers in Behavioral Neuroscience, 10, 79.
doi: 10.3389/fnbeh.2016.00079 pmid: 27148000 |
| [87] |
Peacock, C. E., & Ekstrom, A. D. (2019). Verbal cues flexibly transform spatial representations in human memory. Memory, 27(4), 465-479.
doi: 10.1080/09658211.2018.1520890 pmid: 30207206 |
| [88] |
Peer, M., Brunec, I. K., Newcombe, N. S., & Epstein, R. A. (2021). Structuring knowledge with cognitive maps and cognitive graphs. Trends in Cognitive Sciences, 25(1), 37-54.
doi: 10.1016/j.tics.2020.10.004 pmid: 33248898 |
| [89] | Perelman, B. S., Evans III, A. W., & Schaefer, K. E. (2017, September). Mental model consensus and shifts during navigation system-assisted route planning. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Vol. 61, No. 1, pp. 1183-1187). Sage CA: Los Angeles, CA: SAGE Publications. |
| [90] | Pitt, B., Carstensen, A., Boni, I., Piantadosi, S. T., & Gibson, E. (2022). Different reference frames on different axes: Space and language in indigenous Amazonians. Science Advances, 8(47), eabp9814. |
| [91] |
Priestley, J. B., Bowler, J. C., Rolotti, S. V., Fusi, S., & Losonczy, A. (2022). Article Signatures of rapid plasticity in hippocampal CA1 representations during novel experiences. Neuron, 110(12), 1978-1992.
doi: 10.1016/j.neuron.2022.03.026 pmid: 35447088 |
| [92] |
Raithel, C. U., & Gottfried, J. A. (2021). Using your nose to find your way: Ethological comparisons between human and non-human species. Neuroscience and Biobehavioral Reviews, 128, 766-779.
doi: 10.1016/j.neubiorev.2021.06.040 pmid: 34214515 |
| [93] |
Renault, A. G., Auvray, M., Parseihian, G., Miall, R. C., Cole, J., & Sarlegna, F. R. (2018). Does proprioception influence human spatial cognition? A study on individuals with massive deafferentation. Frontiers in Psychology, 9, 1322.
doi: 10.3389/fpsyg.2018.01322 pmid: 30131736 |
| [94] | Santoro, I., Murgia, M., Sors, F., & Agostini, T. (2020). The influence of the encoding modality on spatial navigation for sighted and late-blind people. Multisensory Research, 33(4-5), 505-520. |
| [95] |
Sheldon, S., & El-Asmar, N. (2018). The cognitive tools that support mentally constructing event and scene representations. Memory, 26(6), 858-868.
doi: 10.1080/09658211.2017.1417440 pmid: 29281940 |
| [96] | Stensola, H., Stensola, T., Solstad, T., Frøland, K., Moser, M. B., & Moser, E. I. (2012). The entorhinal grid map is discretized. Nature, 492(7427), 72-78. |
| [97] |
Sun, C., Yang, W., Martin, J., & Tonegawa, S. (2020). Hippocampal neurons represent events as transferable units of experience. Nature Neuroscience, 23(5), 651-663.
doi: 10.1038/s41593-020-0614-x pmid: 32251386 |
| [98] |
Teghil, A., Boccia, M., Bonavita, A., & Guariglia, C. (2019). Temporal features of spatial knowledge: Representing order and duration of topographical information. Behavioural Brain Research, 376, 112218.
doi: 10.1016/j.bbr.2019.112218 |
| [99] | Tolman, E. C. (1948). Cognitive maps in rats and men. Psychological Review, 55(4), 189. |
| [100] |
Trettel, S. G., Trimper, J. B., Hwaun, E., Fiete, I. R., & Colgin, L. L. (2019). Grid cell co-activity patterns during sleep reflect spatial overlap of grid fields during active behaviors. Nature Neuroscience, 22(4), 609-617.
doi: 10.1038/s41593-019-0359-6 pmid: 30911183 |
| [101] | van Ments, L., & Treur, J. (2021). Reflections on dynamics, adaptation and control: A cognitive architecture for mental models. Cognitive Systems Research, 70, 1-9. |
| [102] | Vercillo, T., & Gori, M. (2016). Blind individuals represent the auditory space in an egocentric rather than allocentric reference frame. Electronic Imaging, 28, 1-5. |
| [103] | Voros, J., Kravets, V., Smith, K., & Clark, T. K. (2024). Humans gradually integrate sudden gain or loss of visual information into spatial orientation perception. Frontiers in Neuroscience, 17, 1274949. |
| [104] | Wang, C. H., Monaco, J. D., & Knierim, J. J. (2020). Hippocampal place cells encode local surface-texture boundaries. Current Biology, 30(8), 1397-1409. |
| [105] | Wang, L., Mou, W., & Sun, X. (2014). Development of landmark knowledge at decision points. Spatial Cognition & Computation, 14(1), 1-17. |
| [106] | Wang, R. F. (2016). Building a cognitive map by assembling multiple path integration systems. Psychonomic Bulletin & Review, 23(3), 692-702. |
| [107] |
Wang, R. F., & Spelke, E. S. (2000). Updating egocentric representations in human navigation. Cognition, 77(3), 215-250.
pmid: 11018510 |
| [108] | Warren, W. H. (2019). Non-euclidean navigation. Journal of Experimental Biology, 222(Suppl_1), jeb187971. |
| [109] | Weisberg, S. M., & Newcombe, N. S. (2015). How do (some) people make a cognitive map? Routes, places, and working memory. Journal of Experimental Psychology: Learning, Memory, and Cognition, 42( 5), 768-785. |
| [110] |
Widloski, J., & Fiete, I. R. (2014). A model of grid cell development through spatial exploration and spike time- dependent plasticity. Neuron, 83(2), 481-495.
doi: S0896-6273(14)00540-6 pmid: 25033187 |
| [111] |
Wiener, J. M., Berthoz, A., & Wolbers, T. (2011). Dissociable cognitive mechanisms underlying human path integration. Experimental Brain Research, 208(1), 61-71.
doi: 10.1007/s00221-010-2460-7 pmid: 20972774 |
| [112] | Williams, H. P., Voros, J. L., Merfeld, D. M., Clark, T. K., & (2021). Naval Medical Research Unit Dayton University of Colorado Ohio State University. Extending the observer model for human orientation perception to include in-flight perceptual thresholds. Naval Medical Research Unit Dayton. Tech. Rep. |
| [113] |
Wolbers, T., & Hegarty, M. (2010). What determines our navigational abilities. Trends in Cognitive Sciences, 14(3), 138-146.
doi: 10.1016/j.tics.2010.01.001 pmid: 20138795 |
| [114] | Wunderlich, A., Grieger, S., & Gramann, K. (2023). Landmark information included in turn-by-turn instructions induce incidental acquisition of lasting route knowledge. Spatial Cognition & Computation, 23(1), 31-56. |
| [115] |
Yesiltepe, D., Conroy Dalton, R., & Ozbil Torun, A. (2021). Landmarks in wayfinding: A review of the existing literature. Cognitive Processing, 22(3), 369-410.
doi: 10.1007/s10339-021-01012-x pmid: 33682034 |
| [116] | Yesiltepe, D., Dalton, R., Torun, A. O., Dalton, N., Noble, S., Hornberger, M., Coutrot, A., & Spiers, H. (2019, July). Usage of Landmarks in Virtual Environments for Wayfinding: Research on the influence of global landmarks. Paper presented at the meeting of 12SSS-12th International Space Syntax Symposium, Beijing, China. |
| [117] | Zhong, J. Y., & Kozhevnikov, M. (2016). Relating allocentric and egocentric survey-based representations to the self-reported use of a navigation strategy of egocentric spatial updating. Journal of Environmental Psychology, 46, 154-175. |
| [118] |
Zingg, B., Hintiryan, H., Gou, L., Song, M. Y., Bay, M., Bienkowski, M. S.,... Dong, H. W. (2014). Neural Networks of the Mouse Neocortex. Cell, 156(5), 1096-1111.
doi: 10.1016/j.cell.2014.02.023 pmid: 24581503 |
| [1] | 刘佳丽, 赵海潮, 何清华. 自我中心与非自我中心空间参考系转换的神经机制[J]. 心理科学进展, 2025, 33(6): 1027-1035. |
| [2] | 薛笑然, 崔伟, 张丽. 空间导航能力性别差异的三水平元分析[J]. 心理科学进展, 2025, 33(5): 843-862. |
| [3] | 吴际, 李会杰. 认知空间映射及其神经机制[J]. 心理科学进展, 2025, 33(1): 62-76. |
| [4] | 张凤翔, 陈美璇, 蒲艺, 孔祥祯. 空间导航能力个体差异的多层次形成机制[J]. 心理科学进展, 2023, 31(9): 1642-1664. |
| [5] | 孔祥祯, 张凤翔, 蒲艺. 空间导航的脑网络基础和调控机制[J]. 心理科学进展, 2023, 31(3): 330-337. |
| [6] | 吴文雅, 王亮. 认知地图及其内在机制[J]. 心理科学进展, 2023, 31(10): 1856-1872. |
| [7] | 郝鑫, 袁忠萍, 林淑婷, 沈婷. 边界促进空间导航的认知神经机制[J]. 心理科学进展, 2022, 30(7): 1496-1510. |
| [8] | 张家鑫, 海拉干, 李会杰. 空间导航的测量及其在认知老化中的应用[J]. 心理科学进展, 2019, 27(12): 2019-2033. |
| [9] | 李丹;杨昭宁. 空间导航:路标学习和路径整合的关系[J]. 心理科学进展, 2015, 23(10): 1755-1762. |
| [10] | 聂婧;凌文辁;李明. 认知地图技术及其在管理心理学中的应用述评[J]. 心理科学进展, 2013, 21(1): 155-165. |
| [11] | 许琴;罗宇;刘嘉. 方向感的加工机制及影响因素[J]. 心理科学进展, 2010, 18(8): 1208-1221. |
| [12] | 王彦;苏彦捷. 迷宫与动物行为研究[J]. 心理科学进展, 2001, 9(3): 264-269. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||