ISSN 1671-3710
CN 11-4766/R
主办:中国科学院心理研究所
出版:科学出版社
CN 11-4766/R
主办:中国科学院心理研究所
出版:科学出版社
心理科学进展 ›› 2023, Vol. 31 ›› Issue (10): 1856-1872.doi: 10.3724/SP.J.1042.2023.01856 cstr: 32111.14.2023.01856
吴文雅, 王亮( )
)
收稿日期:2023-04-19
出版日期:2023-10-15
发布日期:2023-07-25
通讯作者:
王亮, E-mail: lwang@psych.ac.cn基金资助:
WU Wenya, WANG Liang()
Received:2023-04-19
Online:2023-10-15
Published:2023-07-25
摘要:
空间导航对于人和动物的生存而言都十分重要, 有效的空间表征或认知地图是空间导航的基础。认知地图的典型属性包括选择性、灵活性以及层级性, 海马、场景选择区域以及前额叶等多个脑区都参与认知地图的构建。认知地图的表征形式存在欧式地图和拓扑图两种理论, 但各自单独都不能全面解释实际导航中的行为表现, 因此有研究者提出了标签图等理论试图调和二者间的矛盾。未来研究还需要关注在认知地图构建过程中层级性的变化, 空间范畴的扩展, 以及认知地图假说的局限。
中图分类号:
吴文雅, 王亮. (2023). 认知地图及其内在机制. 心理科学进展 , 31(10), 1856-1872.
WU Wenya, WANG Liang. (2023). The cognitive map and its intrinsic mechanisms. Advances in Psychological Science, 31(10), 1856-1872.
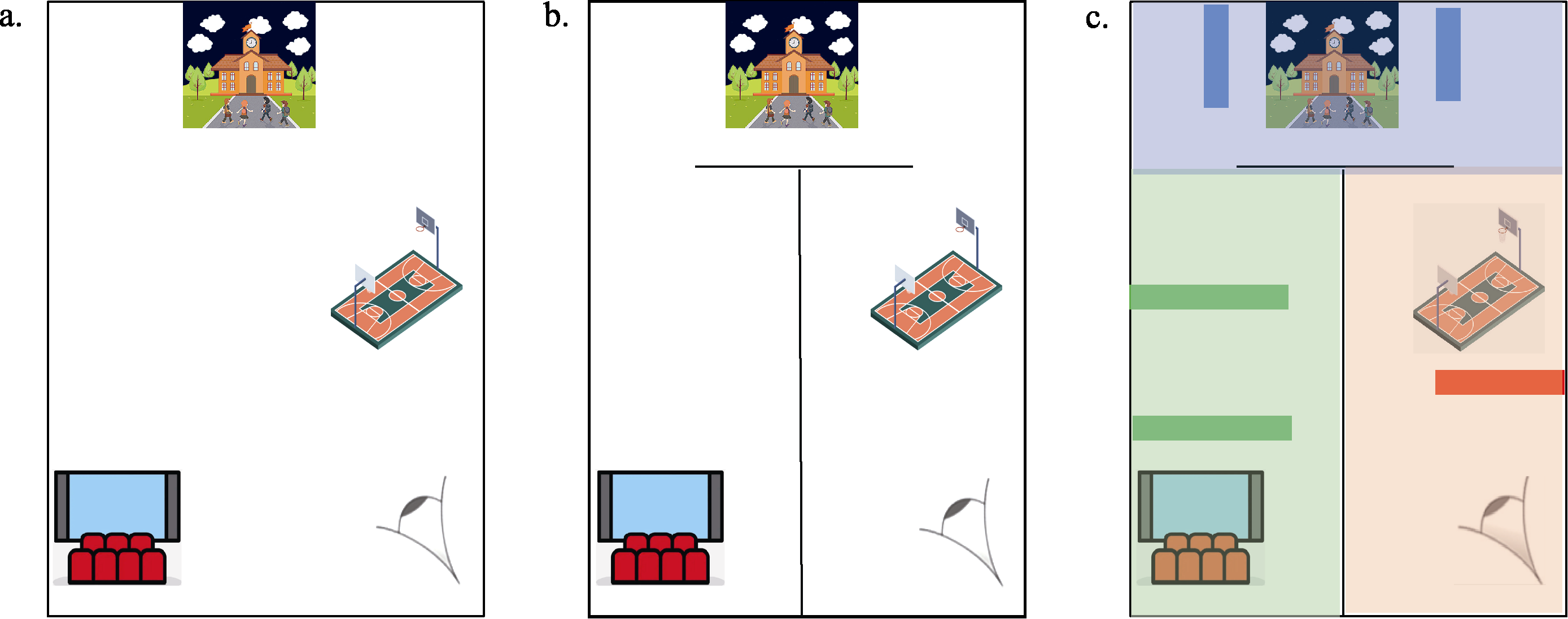
图1 单视点空间(a)、环境空间(b)和嵌套的环境空间(c)示意图。在单视点空间中, 从一个位置或视点可以总览空间内的所有物体或位置。在环境空间中, 由于存在遮挡, 需要在障碍物之间不断移动和穿梭, 分别观察和学习每个单视点空间中的信息, 随后整合形成全局空间认知。在嵌套空间中, 每个区域可能包含多个子区域, 如图中三种颜色背景代表三个不同区域, 每个区域内部又有由彩色线段分隔开的多个子区(类似于不同小区内部进一步分成不同单元)。彩图见电子版。

图2 海马位置细胞(a)和内嗅皮层网格细胞(b)的放电模式示意图。黑色线代表动物在方形区域内的奔跑轨迹, 红色点代表细胞发放(spikes)的峰值位置, 叠加在运动轨迹上。位置细胞只有单一的放电位置, 而网格细胞的放电位置构成了周期性的六边形(或6个正三角形) (改编自Moser et al., 2008)。
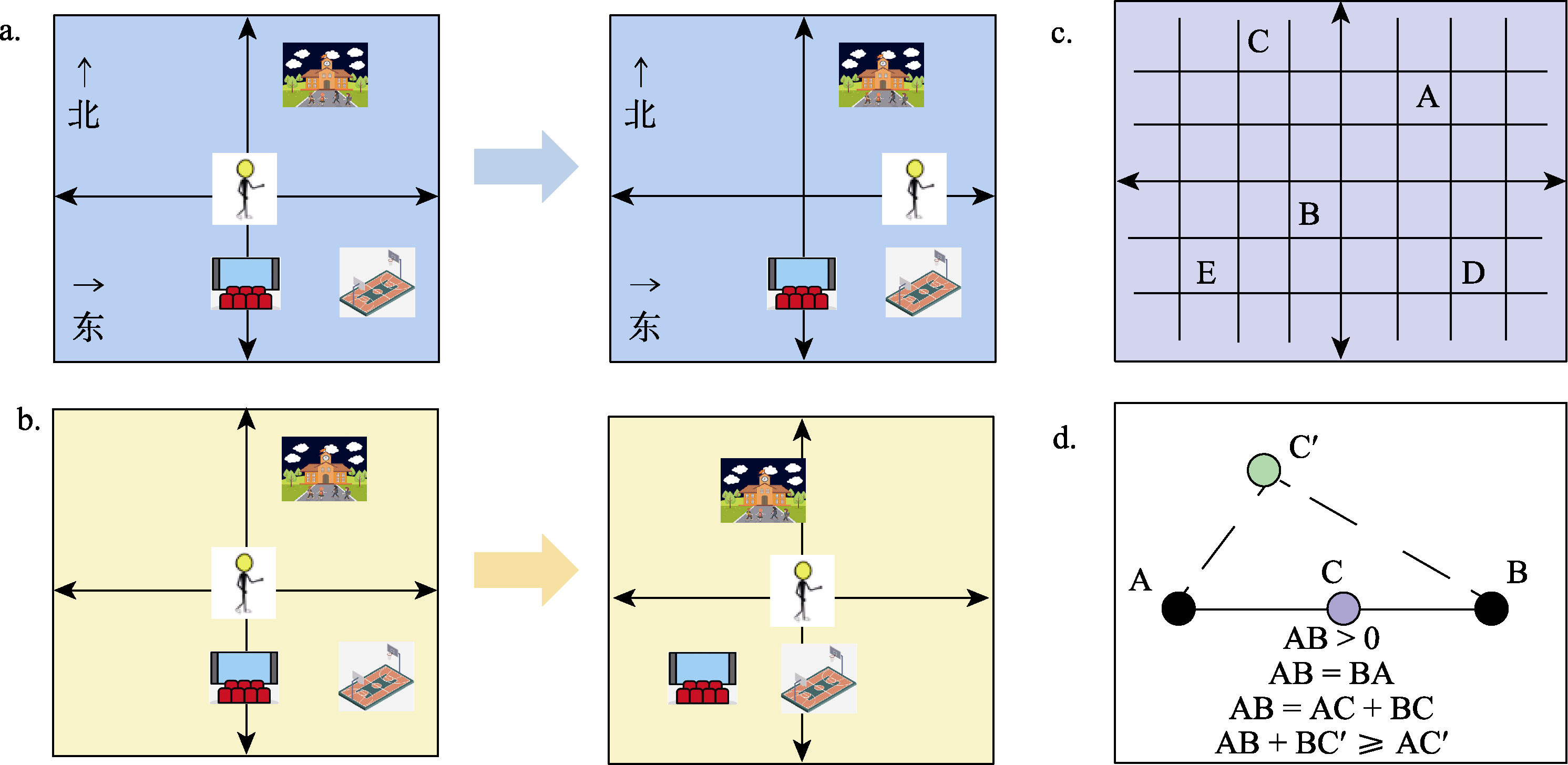
图3 a. 环境中心的参考框架(allocentric reference frame), 导航者对环境的表征不受导航者自身移动的影响; b. 自我中心的参考框架(egocentric reference frame), 导航者始终以自身为参考中心, 对环境的表征会随着自身移动而变化; c. 欧式认知地图的示意图, 包含具体的位置坐标、方向角度等全面的度量信息; d. 欧式几何的基本假定。
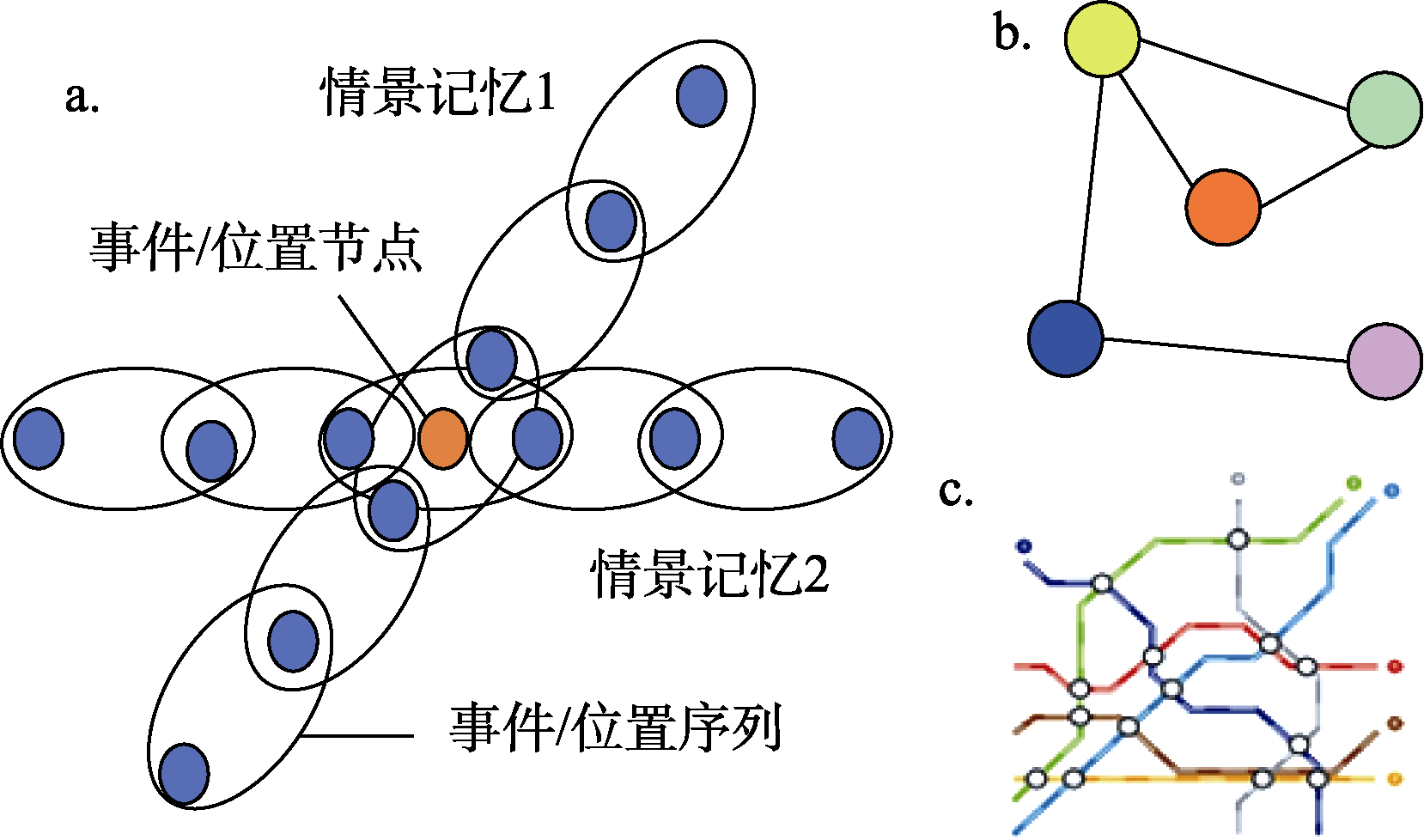
图4 a. 记忆空间理论示意图, 每个有色圆点代表特定的事件或位置, 连续发生的事件或连续经历的位置序列构成一条情景记忆, 不同情景记忆之间可能存在公共元素(红色圆点), 借此建立记忆空间(图改编自Eichenbaum et al., 1999)。 b. 拓扑图的示意图, 节点代表位置, 节点间的连接边代表位置间的转移关系。c. 地铁线路图——拓扑图在现实生活中的案例, 不同颜色线条代表不同线路, 线路上空心圆代表站点。彩图见电子版。
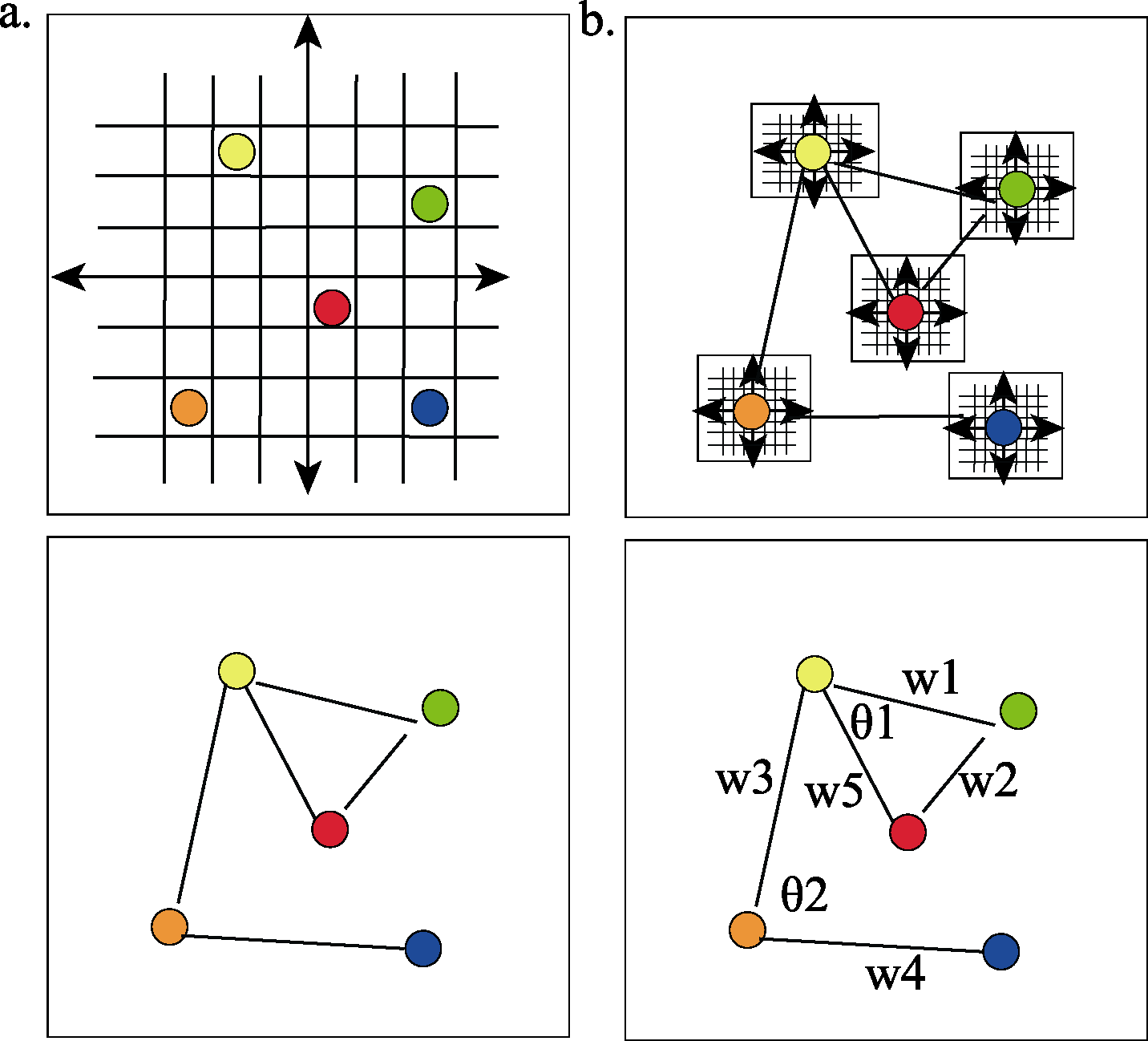
图5 a. 欧式地图(上)和拓扑图(下)的示意图; b. 参考框架网络理论(上)在每个局部区域都存在精确的欧式参考框架, 有标签图假设(下)在节点间辅以夹角信息和连接边权重。

图6 空间表征层级理论的示意图。强层级理论认为同一层级不同分支区域内的位置之间不存在空间关系编码, 而部分层级理论则相反。

图7 认知地图的层级性变化假设。图中A, B和C代表位于上位等级的区域, 而各自之下树状分支的三个位置是它们的子区域, 同一上位等级区域内的不同子区域间(图中不同颜色的1, 2, 3)存在拓扑关系, 并且欧式位置信息也会被同时表征。随着认知地图的形成, 空间表征逐渐从局部扩展到全局, 相应负责的脑区也会变化(左侧蓝色虚线代表认知地图的形成, 红色虚线则表示调用认知地图进行导航规划的过程)。空间表征的层级性并非一成不变的, 可能会随着认知地图的逐步扩大, 而将不同区域的边界进行融合, 最终有可能所有位置表征之间的层级性会逐渐消失, 即形成图中A, B和C三个区域内9个位置的欧式表征和拓扑表征整合后的认知地图。彩图见电子版。
| [1] |
何诗, 阴劼. (2022). 认知地图的地理学研究进展与展望. 地理科学进展, 41(1), 73-85.
doi: 10.18306/dlkxjz.2022.01.007 |
| [2] | 康德. (2004). 纯粹理性批判 (邓晓芒译). 北京: 人民出版社. (原著1781) |
| [3] | 梁群君, 郑森宁, 李金惠, 黄瑞旺. (2022). 压后皮质在空间导航的作用: 认知地图与环境的映射. 心理科学, 45(1), 2-8. |
| [4] | 阮晓钢, 柴洁, 武悦, 张晓平, 黄静. (2021). 基于海马体位置细胞的认知地图构建与导航. 自动化学报, 47(3), 666-677. |
| [5] | 王琳, 王亮. (2017). 认知地图的神经环路基础. 生物化学与生物物理进展, 44(3), 187-197. |
| [6] | 赵民涛. (2006). 物体位置与空间关系的心理表征. 心理科学进展, 14(3), 321-327. |
| [7] | Alme, C. B., Miao, C., Jezek, K., Treves, A., Moser, E. I., & Moser, M.-B. (2014). Place cells in the hippocampus:Eleven maps for eleven rooms. Proceedings of the National Academy of Sciences, 111(52), 18428-18435. |
| [8] | Anggraini, D., Glasauer, S., & Wunderlich, K. (2018). Neural signatures of reinforcement learning correlate with strategy adoption during spatial navigation. Scientific Reports, 8(1), 10110. |
| [9] |
Appleyard, D. (1970). Styles and methods of structuring a city. Environment and Behavior, 2(1), 100-117.
doi: 10.1177/001391657000200106 URL |
| [10] |
Baldassano, C., Chen, J., Zadbood, A., Pillow, J. W., Hasson, U., & Norman, K. A. (2017). Discovering event structure in continuous narrative perception and memory. Neuron, 95(3), 709-721.
doi: S0896-6273(17)30593-7 pmid: 28772125 |
| [11] |
Beals, R., Krantz, D. H., & Tversky, A. (1968). Foundations of multidimensional scaling. Psychological Review, 75(2), 127-142.
pmid: 4870550 |
| [12] |
Bellmund, J. L., de Cothi, W., Ruiter, T. A., Nau, M., Barry, C., & Doeller, C. F. (2020). Deforming the metric of cognitive maps distorts memory. Nature Human Behaviour, 4(2), 177-188.
doi: 10.1038/s41562-019-0767-3 pmid: 31740749 |
| [13] |
Bellmund, J. L., Deuker, L., Navarro Schröder, T., & Doeller, C. F. (2016). Grid-cell representations in mental simulation. Elife, 5, e17089. https://doi.org/10.7554/eLife.17089.001
doi: 10.7554/eLife.17089 URL |
| [14] | Borges, J. L., & Casares, A. B. (Eds). (1971). Extraordinary tales. New York: Herder and Herder. |
| [15] |
Brown, T. I., Gagnon, S. A., & Wagner, A. D. (2020). Stress disrupts human hippocampal-prefrontal function during prospective spatial navigation and hinders flexible behavior. Current Biology, 30(10), 1821-1833.
doi: S0960-9822(20)30342-0 pmid: 32243859 |
| [16] |
Brown, T. I., Ross, R. S., Tobyne, S. M., & Stern, C. E. (2012). Cooperative interactions between hippocampal and striatal systems support flexible navigation. Neuroimage, 60(2), 1316-1330.
doi: 10.1016/j.neuroimage.2012.01.046 pmid: 22266411 |
| [17] |
Brunec, I. K., Bellana, B., Ozubko, J. D., Man, V., Robin, J., Liu, Z. X., ... Moscovitch, M. (2018). Multiple scales of representation along the hippocampal anteroposterior axis in humans. Current Biology, 28(13), 2129-2135.
doi: S0960-9822(18)30618-3 pmid: 29937352 |
| [18] |
Brunec, I. K., & Momennejad, I. (2022). Predictive representations in hippocampal and prefrontal hierarchies. Journal of Neuroscience, 42(2), 299-312.
doi: 10.1523/JNEUROSCI.1327-21.2021 URL |
| [19] |
Burroughs, W. J., & Sadalla, E. K. (1979). Asymmetries in distance cognition. Geographical Analysis, 11(4), 414-421.
doi: 10.1111/gean.1979.11.issue-4 URL |
| [20] |
Byrne, R. W. (1979). Memory for urban geography. The Quarterly Journal of Experimental Psychology, 31(1), 147-154.
doi: 10.1080/14640747908400714 URL |
| [21] |
Carpenter, F., Manson, D., Jeffery, K., Burgess, N., & Barry, C. (2015). Grid cells form a global representation of connected environments. Current Biology, 25(9), 1176-1182.
doi: 10.1016/j.cub.2015.02.037 pmid: 25913404 |
| [22] |
Chen, X., He, Q., Kelly, J. W., Fiete, I. R., & McNamara, T. P. (2015). Bias in human path integration is predicted by properties of grid cells. Current Biology, 25(13), 1771-1776.
doi: 10.1016/j.cub.2015.05.031 pmid: 26073138 |
| [23] |
Costa, K. M., Scholz, R., Lloyd, K., Moreno-Castilla, P., Gardner, M. P., Dayan, P., & Schoenbaum, G. (2023). The role of the lateral orbitofrontal cortex in creating cognitive maps. Nature Neuroscience, 26(1), 107-115.
doi: 10.1038/s41593-022-01216-0 pmid: 36550290 |
| [24] |
Coutrot, A., Manley, E., Goodroe, S., Gahnstrom, C., Filomena, G., Yesiltepe, D., ... Spiers, H. J. (2022). Entropy of city street networks linked to future spatial navigation ability. Nature, 604(7904), 104-110.
doi: 10.1038/s41586-022-04486-7 |
| [25] |
Dabaghian, Y., Brandt, V. L., & Frank, L. M. (2014). Reconceiving the hippocampal map as a topological template. Elife, 3, e03476. https://doi.org/10.7554/eLife.03476.001
doi: 10.7554/eLife.03476 URL |
| [26] | Dahmani, L., & Bohbot, V. D. (2020). Habitual use of GPS negatively impacts spatial memory during self-guided navigation. Scientific Report, 10(1), 6310. |
| [27] |
de Cothi, W., Nyberg, N., Griesbauer, E.-M., Ghanamé, C., Zisch, F., Lefort, J. M., ... Spiers, H. J. (2022). Predictive maps in rats and humans for spatial navigation. Current Biology, 32(17), 3676-3689.
doi: 10.1016/j.cub.2022.06.090 URL |
| [28] |
Dilks, D. D., Kamps, F. S., & Persichetti, A. S. (2022). Three cortical scene systems and their development. Trends in Cognitive Sciences, 26(2), 117-127.
doi: 10.1016/j.tics.2021.11.002 URL |
| [29] |
Doeller, C. F., Barry, C., & Burgess, N. (2010). Evidence for grid cells in a human memory network. Nature, 463(7281), 657-661.
doi: 10.1038/nature08704 |
| [30] |
Eichenbaum, H. (1997). Declarative memory: Insights from cognitive neurobiology. Annual Review of Psychology, 48(1), 547-572.
doi: 10.1146/psych.1997.48.issue-1 URL |
| [31] |
Eichenbaum, H., Dudchenko, P., Wood, E., Shapiro, M., & Tanila, H. (1999). The hippocampus, memory, and place cells: Is it spatial memory or a memory space? Neuron, 23(2), 209-226.
doi: 10.1016/s0896-6273(00)80773-4 pmid: 10399928 |
| [32] |
Epstein, R. A., Parker, W. E., & Feiler, A. M. (2007). Where am I now? Distinct roles for parahippocampal and retrosplenial cortices in place recognition. Journal of Neuroscience, 27(23), 6141-6149.
doi: 10.1523/JNEUROSCI.0799-07.2007 pmid: 17553986 |
| [33] |
Epstein, R. A., Patai, E. Z., Julian, J. B., & Spiers, H. J. (2017). The cognitive map in humans: Spatial navigation and beyond. Nature Neuroscience, 20(11), 1504-1513.
doi: 10.1038/nn.4656 pmid: 29073650 |
| [34] |
Epsztein, J. (2022). Mental replays enable flexible navigation. Nature, 605(7908), 35-36.
doi: 10.1038/d41586-022-01035-0 |
| [35] |
Evensmoen, H. R., Lehn, H., Xu, J., Witter, M. P., Nadel, L., & Håberg, A. K. (2013). The anterior hippocampus supports a coarse, global environmental representation and the posterior hippocampus supports fine-grained, local environmental representations. Journal of Cognitive Neuroscience, 25(11), 1908-1925.
doi: 10.1162/jocn_a_00436 pmid: 23806136 |
| [36] |
Farzanfar, D., Spiers, H. J., Moscovitch, M., & Rosenbaum, R. S. (2023). From cognitive maps to spatial schemas. Nature Reviews Neuroscience, 24(2), 63-79.
doi: 10.1038/s41583-022-00655-9 |
| [37] | Gahnstrom, C. J., & Spiers, H. J. (2020). Striatal and hippocampal contributions to flexible navigation in rats and humans. Brain and Neuroscience Advances, 4, 1-7. |
| [38] | Gallistel, C. R. (1990). The organization of learning. Cambridge: The MIT Press. |
| [39] |
Garvert, M. M., Saanum, T., Schulz, E., Schuck, N. W., & Doeller, C. F. (2023). Hippocampal spatio-predictive cognitive maps adaptively guide reward generalization. Nature Neuroscience, 26(4), 615-626.
doi: 10.1038/s41593-023-01283-x |
| [40] |
Gatti, D., Marelli, M., Vecchi, T., & Rinaldi, L. (2022). Spatial representations without spatial computations. Psychological Science, 33(11), 1947-1958.
doi: 10.1177/09567976221094863 pmid: 36201754 |
| [41] | Genzel, D., Yovel, Y., & Yartsev, M. M. (2018). Neuroethology of bat navigation. Current Biology, 28(17), R997-R1004. |
| [42] |
Goldshtein, A., Harten, L., & Yovel, Y. (2022). Mother bats facilitate pup navigation learning. Current Biology, 32(2), 350-360.
doi: 10.1016/j.cub.2021.11.010 URL |
| [43] |
Golledge, R. G., Ruggles, A. J., Pellegrino, J. W., & Gale, N. D. (1993). Integrating route knowledge in an unfamiliar neighborhood: Along and across route experiments. Journal of Environmental Psychology, 13(4), 293-307.
doi: 10.1016/S0272-4944(05)80252-X URL |
| [44] |
Hafting, T., Fyhn, M., Molden, S., Moser, M.-B., & Moser, E. I. (2005). Microstructure of a spatial map in the entorhinal cortex. Nature, 436(7052), 801-806.
doi: 10.1038/nature03721 |
| [45] |
Harten, L., Katz, A., Goldshtein, A., Handel, M., & Yovel, Y. (2020). The ontogeny of a mammalian cognitive map in the real world. Science, 369(6500), 194-197.
doi: 10.1126/science.aay3354 pmid: 32647001 |
| [46] | Hartley, S. (2017). Mrs P's journey: The remarkable story of the woman who created the AZ map. New York: Simon and Schuster. |
| [47] |
Henriksson, L., Mur, M., & Kriegeskorte, N. (2019). Rapid invariant encoding of scene layout in human OPA. Neuron, 103(1), 161-171.
doi: S0896-6273(19)30349-6 pmid: 31097360 |
| [48] |
Hirtle, S. C., & Jonides, J. (1985). Evidence of hierarchies in cognitive maps. Memory & Cognition, 13(3), 208-217.
doi: 10.3758/BF03197683 URL |
| [49] |
Ho, M. K., Abel, D., Correa, C. G., Littman, M. L., Cohen, J. D., & Griffiths, T. L. (2022). People construct simplified mental representations to plan. Nature, 606(7912), 129-136.
doi: 10.1038/s41586-022-04743-9 |
| [50] |
Howard, L. R., Javadi, A. H., Yu, Y., Mill, R. D., Morrison, L. C., Knight, R., ... Spiers, H. J. (2014). The hippocampus and entorhinal cortex encode the path and Euclidean distances to goals during navigation. Current Biology, 24(12), 1331-1340.
doi: S0960-9822(14)00526-0 pmid: 24909328 |
| [51] |
Jacobs, J., Weidemann, C. T., Miller, J. F., Solway, A., Burke, J. F., Wei, X.-X., ... Kahana, M. J. (2013). Direct recordings of grid-like neuronal activity in human spatial navigation. Nature Neuroscience, 16(9), 1188-1190.
doi: 10.1038/nn.3466 pmid: 23912946 |
| [52] |
Jacobs, L. F., & Schenk, F. (2003). Unpacking the cognitive map: The parallel map theory of hippocampal function. Psychological Review, 110(2), 285-315.
pmid: 12747525 |
| [53] | Javadi, A.-H., Emo, B., Howard, L. R., Zisch, F. E., Yu, Y., Knight, R., Silva, J. P., & Spiers, H. J. (2017). Hippocampal and prefrontal processing of network topology to simulate the future. Nature Communications, 8(1), 14652. |
| [54] |
Javadi, A.-H., Patai, E. Z., Marin-Garcia, E., Margolis, A., Tan, H.-R. M., Kumaran, D., ... Spiers, H. J. (2019). Prefrontal dynamics associated with efficient detours and shortcuts: A combined functional magnetic resonance imaging and magnetoencenphalography study. Journal of Cognitive Neuroscience, 31(8), 1227-1247.
doi: 10.1162/jocn_a_01414 URL |
| [55] |
Julian, J. B., Ryan, J., Hamilton, R. H., & Epstein, R. A. (2016). The occipital place area is causally involved in representing environmental boundaries during navigation. Current Biology, 26(8), 1104-1109.
doi: 10.1016/j.cub.2016.02.066 pmid: 27020742 |
| [56] |
Kabadayi, C., Bobrowicz, K., & Osvath, M. (2018). The detour paradigm in animal cognition. Animal cognition, 21(1), 21-35.
doi: 10.1007/s10071-017-1152-0 pmid: 29234898 |
| [57] |
Kaefer, K., Nardin, M., Blahna, K., & Csicsvari, J. (2020). Replay of behavioral sequences in the medial prefrontal cortex during rule switching. Neuron, 106(1), 154-165.
doi: S0896-6273(20)30041-6 pmid: 32032512 |
| [58] |
Kerkman, D. D., Stea, D., Norris, K., & Rice, J. L. (2004). Social attitudes predict biases in geographic knowledge. The Professional Geographer, 56(2), 258-269.
doi: 10.1111/j.0033-0124.2004.05602009.x URL |
| [59] |
Kim, M., & Doeller, C. F. (2022). Adaptive cognitive maps for curved surfaces in the 3D world. Cognition, 225, 105126. https://doi.org/10.1016/j.cognition.2022.105126
doi: 10.1016/j.cognition.2022.105126 URL |
| [60] |
Kim, M., & Maguire, E. A. (2018). Hippocampus, retrosplenial and parahippocampal cortices encode multicompartment 3D space in a hierarchical manner. Cerebral Cortex, 28(5), 1898-1909.
doi: 10.1093/cercor/bhy054 URL |
| [61] |
Lacroix, L., White, I., & Feldon, J. (2002). Effect of excitotoxic lesions of rat medial prefrontal cortex on spatial memory. Behavioural Brain Research, 133(1), 69-81.
pmid: 12048175 |
| [62] |
Lever, C., Burton, S., Jeewajee, A., O'Keefe, J., & Burgess, N. (2009). Boundary vector cells in the subiculum of the hippocampal formation. Journal of Neuroscience, 29(31), 9771-9777.
doi: 10.1523/JNEUROSCI.1319-09.2009 pmid: 19657030 |
| [63] |
Liang, Q., Li, J., Zheng, S., Liao, J., & Huang, R. (2022). Dynamic causal modelling of hierarchical planning. NeuroImage, 258, 119384. https://doi.org/10.1016/j.neuroimage.2022.119384
doi: 10.1016/j.neuroimage.2022.119384 URL |
| [64] |
Longo, M. R. (2021). Distortion of mental body representations. Trends in Cognitive Sciences. 26(3), 241-254.
doi: 10.1016/j.tics.2021.11.005 pmid: 34952785 |
| [65] |
Mahmoodi, A., Nili, H., Harbison, C., Hamilton, S., Trudel, N., Bang, D., & Rushworth, M. F. (2023). Causal role of a neural system for separating and selecting multidimensional social cognitive information. Neuron. 111(7), 1152-1164.
doi: 10.1016/j.neuron.2022.12.030 URL |
| [66] |
Mallot, H. A., & Basten, K. (2009). Embodied spatial cognition: Biological and artificial systems. Image and Vision Computing, 27(11), 1658-1670.
doi: 10.1016/j.imavis.2008.09.001 URL |
| [67] |
Marchette, S. A., Vass, L. K., Ryan, J., & Epstein, R. A. (2015). Outside looking in: landmark generalization in the human navigational system. Journal of Neuroscience, 35(44), 14896-14908.
doi: 10.1523/JNEUROSCI.2270-15.2015 pmid: 26538658 |
| [68] |
McNamara, T. P. (1986). Mental representations of spatial relations. Cognitive Psychology, 18(1), 87-121.
pmid: 3948491 |
| [69] | Meilinger, T. (2008). The network of reference frames theory:A synthesis of graphs and cognitive maps. In: Freksa, C., Newcombe, N. S., Gärdenfors, P., Wölfl, S. (Eds.), Spatial cognition VI. Learning, reasoning, and talking about space. Spatial cognition 2008. Lecture Notes in Computer Science (Vol. 5248, pp. 344-360). Springer, Berlin, Heidelberg. |
| [70] |
Meilinger, T., Strickrodt, M., & Bülthoff, H. H. (2016). Qualitative differences in memory for vista and environmental spaces are caused by opaque borders, not movement or successive presentation. Cognition, 155, 77-95.
doi: S0010-0277(16)30150-0 pmid: 27367592 |
| [71] |
Moar, I., & Carleton, L. R. (1982). Memory for routes. The Quarterly Journal of Experimental Psychology Section A, 34(3), 381-394.
doi: 10.1080/14640748208400850 URL |
| [72] |
Morgan, L. K., MacEvoy, S. P., Aguirre, G. K., & Epstein, R. A. (2011). Distances between real-world locations are represented in the human hippocampus. Journal of Neuroscience, 31(4), 1238-1245.
doi: 10.1523/JNEUROSCI.4667-10.2011 pmid: 21273408 |
| [73] |
Moser, E. I., Kropff, E., & Moser, M.-B. (2008). Place cells, grid cells, and the brain's spatial representation system. Annual Review of Neuroscience, 31, 69-89.
doi: 10.1146/annurev.neuro.31.061307.090723 pmid: 18284371 |
| [74] | Muhle-Karbe, P. S., Sheahan, H., Pezzulo, G., Spiers, H. J., Chien, S., Schuck, N. W., & Summerfield, C. (2023). Goal-seeking compresses neural codes for space in the human hippocampus and orbitofrontal cortex. bioRxiv, 2023-01. https://doi.org/10.1101/2023.01.12.523762 |
| [75] | Nardin, M., Kaefer, K., & Csicsvari, J. (2021). The generalized spatial representation in the prefrontal cortex is inherited from the hippocampus. bioRxiv, 2021-09. https://doi.org/10.1101/2021.09.30.462269 |
| [76] |
O’, Keefe, J., & Dostrovsky, J. (1971). The hippocampus as a spatial map: Preliminary evidence from unit activity in the freely-moving rat. Brain Research. 34(1), 171-175.
doi: 10.1016/0006-8993(71)90358-1 URL |
| [77] | O’Keefe, J., & Nadel, L. (1978). The hippocampus as a cognitive map. Oxford: Oxford University Press. |
| [78] |
Park, J., & Park, S. (2020). Coding of navigational distance and functional constraint of boundaries in the human scene-selective cortex. Journal of Neuroscience, 40(18), 3621-3630.
doi: 10.1523/JNEUROSCI.1991-19.2020 pmid: 32209608 |
| [79] |
Park, S. A., Miller, D. S., & Boorman, E. D. (2021). Inferences on a multidimensional social hierarchy use a grid-like code. Nature Neuroscience, 24(9), 1292-1301.
doi: 10.1038/s41593-021-00916-3 pmid: 34465915 |
| [80] |
Park, S. A., Miller, D. S., Nili, H., Ranganath, C., & Boorman, E. D. (2020). Map making: Constructing, combining, and inferring on abstract cognitive maps. Neuron, 107(6), 1226-1238.
doi: S0896-6273(20)30484-0 pmid: 32702288 |
| [81] |
Patai, E. Z., & Spiers, H. J. (2021). The versatile wayfinder: Prefrontal contributions to spatial navigation. Trends in Cognitive Sciences, 25(6), 520-533.
doi: 10.1016/j.tics.2021.02.010 pmid: 33752958 |
| [82] |
Peer, M., Brunec, I. K., Newcombe, N. S., & Epstein, R. A. (2021). Structuring knowledge with cognitive maps and cognitive graphs. Trends in Cognitive Sciences, 25(1), 37-54.
doi: 10.1016/j.tics.2020.10.004 pmid: 33248898 |
| [83] |
Presotto, A., Verderane, M. P., Biondi, L., Mendonça- Furtado, O. D., Spagnoletti, N., Madden, M., & Izar, P. (2018). Intersection as key locations for bearded capuchin monkeys (Sapajus libidinosus) traveling within a route network. Animal Cognition, 21(3), 393-405.
doi: 10.1007/s10071-018-1176-0 pmid: 29532262 |
| [84] |
Robertson, C. E., Hermann, K. L., Mynick, A., Kravitz, D. J., & Kanwisher, N. (2016). Neural representations integrate the current field of view with the remembered 360 panorama in scene-selective cortex. Current Biology, 26(18), 2463-2468.
doi: S0960-9822(16)30753-9 pmid: 27618266 |
| [85] | Sauer, J.-F., Folschweiller, S., & Bartos, M. (2022). Topographically organized representation of space and context in the medial prefrontal cortex. Proceedings of the National Academy of Sciences, 119(6), e2117300119. https://doi.org/10.1073/pnas.2117300119 |
| [86] |
Schafer, M., & Schiller, D. (2018). Navigating social space. Neuron, 100(2), 476-489.
doi: S0896-6273(18)30894-8 pmid: 30359610 |
| [87] |
Schinazi, V. R., & Epstein, R. A. (2010). Neural correlates of real-world route learning. Neuroimage, 53(2), 725-735.
doi: 10.1016/j.neuroimage.2010.06.065 pmid: 20603219 |
| [88] |
Schlesiger, M. I., Boublil, B. L., Hales, J. B., Leutgeb, J. K., & Leutgeb, S. (2018). Hippocampal global remapping can occur without input from the medial entorhinal cortex. Cell Reports, 22(12), 3152-3159.
doi: S2211-1247(18)30292-4 pmid: 29562172 |
| [89] |
Schuck, N. W., Cai, M. B., Wilson, R. C., & Niv, Y. (2016). Human orbitofrontal cortex represents a cognitive map of state space. Neuron, 91(6), 1402-1412.
doi: S0896-6273(16)30511-6 pmid: 27657452 |
| [90] |
Shallice, T., & Burgess, P. W. (1991). Deficits in strategy application following frontal lobe damage in man. Brain, 114(Pt 2), 727-741.
doi: 10.1093/brain/114.2.727 URL |
| [91] |
Sloan, H. L., Good, M., & Dunnett, S. B. (2006). Double dissociation between hippocampal and prefrontal lesions on an operant delayed matching task and a water maze reference memory task. Behavioural Brain Research, 171(1), 116-126.
pmid: 16677723 |
| [92] | Son, J.-Y., Bhandari, A., & FeldmanHall, O. (2021). Cognitive maps of social features enable flexible inference in social networks. Proceedings of the National Academy of Sciences, 118(39), e2021699118. https://doi.org/10.1073/pnas.2021699118 |
| [93] |
Stachenfeld, K. L., Botvinick, M. M., & Gershman, S. J. (2017). The hippocampus as a predictive map. Nature Neuroscience, 20(11), 1643-1653.
doi: 10.1038/nn.4650 pmid: 28967910 |
| [94] |
Stensola, H., Stensola, T., Solstad, T., Frøland, K., Moser, M.-B., & Moser, E. I. (2012). The entorhinal grid map is discretized. Nature, 492(7427), 72-78.
doi: 10.1038/nature11649 |
| [95] |
Stevens, A., & Coupe, P. (1978). Distortions in judged spatial relations. Cognitive Psychology, 10(4), 422-437.
pmid: 699514 |
| [96] |
Sung, J. Y., Harris, O. K., Hensley, N. M., Chemero, A. P., & Morehouse, N. I. (2021). Beyond cognitive templates: Re-examining template metaphors used for animal recognition and navigation. Integrative and Comparative Biology, 61(3), 825-841.
doi: 10.1093/icb/icab040 URL |
| [97] |
Taube, J. S., Muller, R. U., & Ranck, J. B. (1990). Head- direction cells recorded from the postsubiculum in freely moving rats. I. Description and quantitative analysis. Journal of Neuroscience, 10(2), 420-435.
pmid: 2303851 |
| [98] |
Thorndyke, P. W. (1981). Distance estimation from cognitive maps. Cognitive Psychology, 13(4), 526-550.
doi: 10.1016/0010-0285(81)90019-0 URL |
| [99] |
Tversky, B. (1981). Distortions in memory for maps. Cognitive Psychology, 13(3), 407-433.
doi: 10.1016/0010-0285(81)90016-5 URL |
| [100] |
Tolman, E. C. (1948). Cognitive maps in rats and men. Psychological Review, 55(4), 189-208. https://doi.org/10.1037/h0061626
doi: 10.1037/h0061626 URL pmid: 18870876 |
| [101] | Tversky, B. (1993). Cognitive maps, cognitive collages, and spatial mental models. In: Frank, A. U., Campari, I. (Eds.), Spatial Information Theory A Theoretical Basis for GIS. COSIT 1993. Lecture Notes in Computer Science (Vol. 716, pp. 14-24). Springer, Berlin, Heidelberg. |
| [102] |
Wang, R. F., & Brockmole, J. R. (2003). Human navigation in nested environments. Journal of Experimental Psychology: Learning, Memory, and Cognition, 29(3), 398-404.
doi: 10.1037/0278-7393.29.3.398 URL |
| [103] | Warren, W. H. (2019). Non-euclidean navigation. Journal of Experimental Biology, 222(Suppl_1), jeb187971. https://doi.org/10.1242/jeb.187971 |
| [104] |
Warren, W. H., Rothman, D. B., Schnapp, B. H., & Ericson, J. D. (2017). Wormholes in virtual space: From cognitive maps to cognitive graphs. Cognition, 166, 152-163.
doi: S0010-0277(17)30137-3 pmid: 28577445 |
| [105] |
Wernle, T., Waaga, T., Mørreaunet, M., Treves, A., Moser, M.-B., & Moser, E. I. (2018). Integration of grid maps in merged environments. Nature Neuroscience, 21(1), 92-101.
doi: 10.1038/s41593-017-0036-6 pmid: 29230051 |
| [106] |
Whittington, J. C., Muller, T. H., Mark, S., Chen, G., Barry, C., Burgess, N., & Behrens, T. E. (2020). The Tolman - Eichenbaum machine: Unifying space and relational memory through generalization in the hippocampal formation. Cell, 183(5), 1249-1263.
doi: 10.1016/j.cell.2020.10.024 pmid: 33181068 |
| [107] |
Widdowson, C., & Wang, R. F. (2022). Human navigation in curved spaces. Cognition, 218, 104923. https://doi.org/10.1016/j.cognition.2021.104923
doi: 10.1016/j.cognition.2021.104923 URL |
| [108] |
Widloski, J., & Foster, D. J. (2022). Flexible rerouting of hippocampal replay sequences around changing barriers in the absence of global place field remapping. Neuron, 110(9), 1547-1558.
doi: 10.1016/j.neuron.2022.02.002 pmid: 35180390 |
| [109] |
Wu, X., & Foster, D. J. (2014). Hippocampal replay captures the unique topological structure of a novel environment. Journal of Neuroscience, 34(19), 6459-6469.
doi: 10.1523/JNEUROSCI.3414-13.2014 pmid: 24806672 |
| [110] |
Yousif, S. R. (2022). Redundancy and reducibility in the formats of spatial representations. Perspectives on Psychological Science, 17(6), 1778-1793.
doi: 10.1177/17456916221077115 URL |
| [111] |
Zhang, B., & Naya, Y. (2020). Medial prefrontal cortex represents the object-based cognitive map when remembering an egocentric target location. Cerebral Cortex, 30(10), 5356-5371.
doi: 10.1093/cercor/bhaa117 URL |
| [112] |
Zhang, L., Chen, P., Schafer, M., Zheng, S., Chen, L., Wang, S., ... Huang, R. (2022). A specific brain network for a social map in the human brain. Scientific Reports, 12(1), 1773. https://doi.org/10.1038/s41598-022-05601-4
doi: 10.1038/s41598-022-05601-4 URL pmid: 35110581 |
| [113] |
Zhao, M. (2018). Human spatial representation: What we cannot learn from the studies of rodent navigation. Journal of Neurophysiology, 120(5), 2453-2465.
doi: 10.1152/jn.00781.2017 pmid: 30133384 |
| [114] | Zong, W., Zhou, J., Gardner, M. P., Costa, K. M., Zhang, Z., & Schoenbaum, G. (2023). Schema cell formation in orbitofrontal cortex is suppressed by hippocampal output. bioRxiv, 2023-05. https://doi.org/10.1101/2023.05.03.539307 |
| [1] | 吴际, 李会杰. 认知空间映射及其神经机制[J]. 心理科学进展, 2025, 33(1): 62-76. |
| [2] | 张凤翔, 陈美璇, 蒲艺, 孔祥祯. 空间导航能力个体差异的多层次形成机制[J]. 心理科学进展, 2023, 31(9): 1642-1664. |
| [3] | 曹晋菁, 仇式明, 定险峰, 程晓荣, 范炤. 意识的层级性和丰富性:解读意识的两条路径[J]. 心理科学进展, 2023, 31(7): 1172-1185. |
| [4] | 孔祥祯, 张凤翔, 蒲艺. 空间导航的脑网络基础和调控机制[J]. 心理科学进展, 2023, 31(3): 330-337. |
| [5] | 聂婧;凌文辁;李明. 认知地图技术及其在管理心理学中的应用述评[J]. 心理科学进展, 2013, 21(1): 155-165. |
| [6] | 许琴;罗宇;刘嘉. 方向感的加工机制及影响因素[J]. 心理科学进展, 2010, 18(8): 1208-1221. |
| [7] | 徐晓东;刘昌. 数字的空间特性[J]. 心理科学进展, 2006, 14(6): 851-858. |
| [8] | 牟炜民;赵民涛;李晓鸥. 人类空间记忆和空间巡航[J]. 心理科学进展, 2006, 14(4): 497-504. |
| [9] | 赵民涛 . 物体位置与空间关系的心理表征[J]. 心理科学进展, 2006, 14(3): 321-327. |
| [10] | 王彦;苏彦捷. 迷宫与动物行为研究[J]. 心理科学进展, 2001, 9(3): 264-269. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||