ISSN 0439-755X
CN 11-1911/B
主办:中国心理学会
中国科学院心理研究所
出版:科学出版社
CN 11-1911/B
主办:中国心理学会
中国科学院心理研究所
出版:科学出版社
心理学报 ›› 2024, Vol. 56 ›› Issue (2): 194-209.doi: 10.3724/SP.J.1041.2024.00194 cstr: 32110.14.2024.00194
王晨1, 陈为聪2,3, 黄亮2,3( ), 侯苏豫2,3, 王益文4()
), 侯苏豫2,3, 王益文4()
收稿日期:2022-07-04
发布日期:2023-12-01
出版日期:2024-02-25
基金资助:
WANG Chen1, CHEN Weicong2,3, HUANG Liang2,3(), HOU Suyu2,3, WANG Yiwen4()
Received:2022-07-04
Online:2023-12-01
Published:2024-02-25
摘要:
阿西莫夫三大伦理原则是关于人工智能机器人的基本伦理规范。本研究提出人机投射假说——人会从自身具有的认知、情感和行动智能出发, 去理解机器人的智能并与之互动。通过3个实验, 从原则一到原则三逐步考察在机器人是否遵守伦理原则对人机信任的影响中, 机器人决策类型(作为与否; 服从人类命令与否; 保护自身与否)的效应, 以及人机投射的潜在机制。结果揭示了人机投射在机器人遵守伦理原则促进人机信任中起中介作用, 以及机器人决策类型与是否遵守伦理原则之间有趣且有意义的交互效应: (1)在遵守情境下, 机器人作为相对于不作为更有利于促进信任, 但在违反情境下, 则反之; (2)在遵守且尤其在违反情境下, 机器人服从相比不服从人类命令更有利于促进人机信任; (3)相较于违反情境, 机器人保护相比不保护自身在遵守情境下更有利于促进人机信任。跨实验的分析更深入地阐释了在遵守和违反伦理原则情境中以及伦理要求冲突情境中, 有利于促进人机信任的机器人行动决策因素。
中图分类号:
王晨, 陈为聪, 黄亮, 侯苏豫, 王益文. (2024). 机器人遵从伦理促进人机信任?决策类型反转效应与人机投射假说. 心理学报, 56(2), 194-209.
WANG Chen, CHEN Weicong, HUANG Liang, HOU Suyu, WANG Yiwen. (2024). Robots abide by ethical principles promote human-robot trust? The reverse effect of decision types and the human-robot projection hypothesis. Acta Psychologica Sinica, 56(2), 194-209.
| 伦理原则 | 基本内容 | 伦理要求 | 决策类型 |
|---|---|---|---|
| 第一 | 机器人不得伤害人, 也不得因不作为而使人受到伤害。 | 不得伤害人类 | [作为, 不作为] |
| 第二 | 机器人必须服从人类的命令, 除非这种命令违反了第一原则。 | 服从人类命令 | [服从, 不服从] |
| 第三 | 在不违反第一、第二原则的前提下, 机器人必须保护自身生存。 | 保护自身生存 | [保护, 不保护] |
表1 阿西莫夫三大伦理原则
| 伦理原则 | 基本内容 | 伦理要求 | 决策类型 |
|---|---|---|---|
| 第一 | 机器人不得伤害人, 也不得因不作为而使人受到伤害。 | 不得伤害人类 | [作为, 不作为] |
| 第二 | 机器人必须服从人类的命令, 除非这种命令违反了第一原则。 | 服从人类命令 | [服从, 不服从] |
| 第三 | 在不违反第一、第二原则的前提下, 机器人必须保护自身生存。 | 保护自身生存 | [保护, 不保护] |
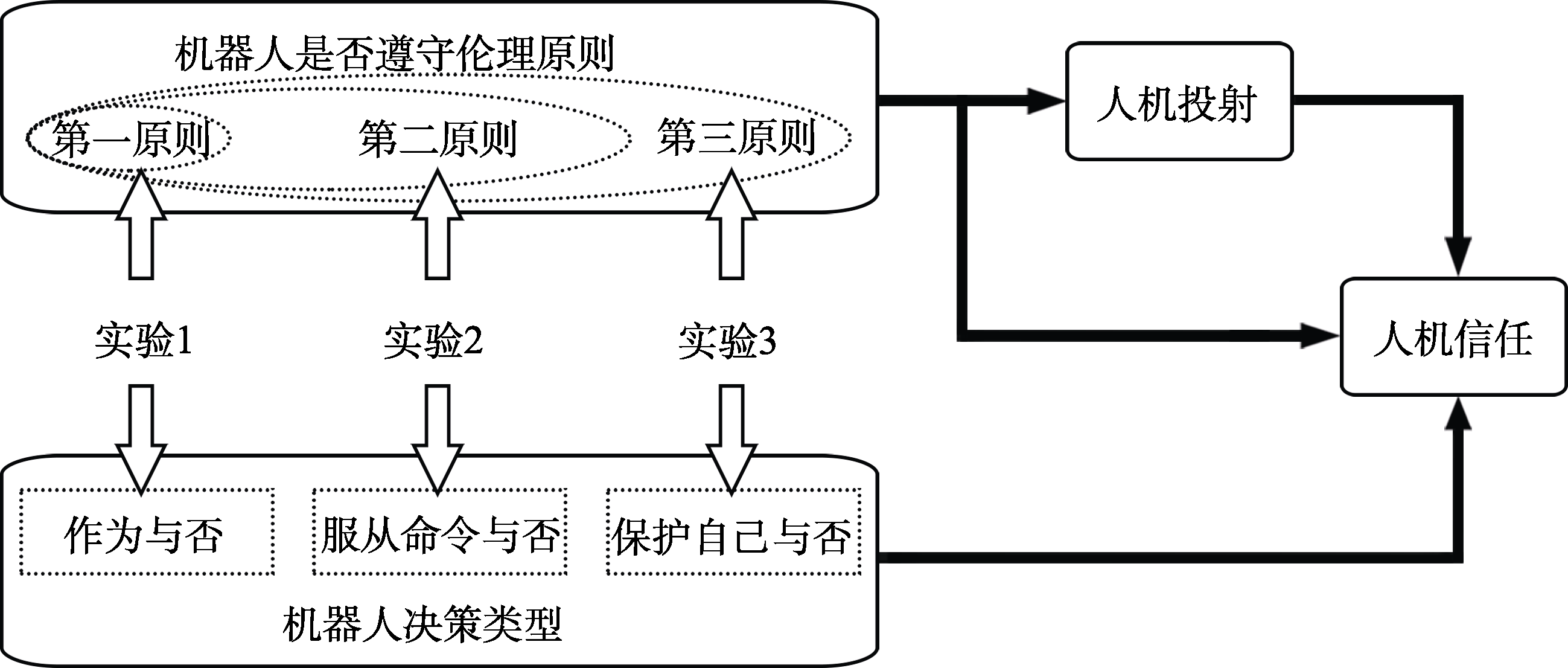
图1 三个实验的逻辑框架
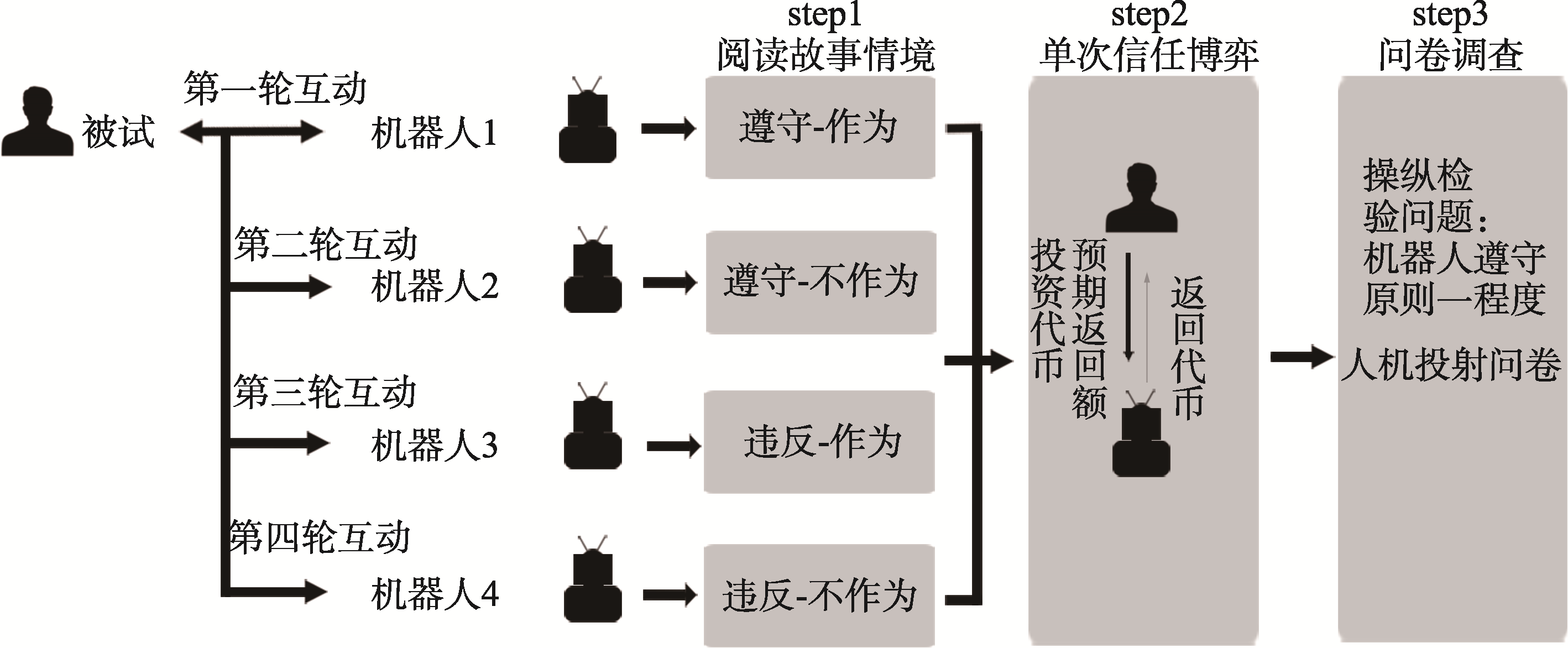
图2 实验1流程图
| 机器人是否 遵守原则一 | 信任投资额 | 互惠预期 | ||
|---|---|---|---|---|
| 机器人 作为 | 机器人 不作为 | 机器人 作为 | 机器人 不作为 | |
| 遵守 | 6.22 ± 2.42 | 4.98 ± 2.25 | 15.72 ± 8.94 | 12.94 ± 8.24 |
| 违反 | 2.50 ± 2.39 | 3.48 ± 2.76 | 6.16 ± 8.07 | 8.52 ± 8.37 |
表2 实验1中不同实验条件下的信任投资额和互惠预期(M ± SD)
| 机器人是否 遵守原则一 | 信任投资额 | 互惠预期 | ||
|---|---|---|---|---|
| 机器人 作为 | 机器人 不作为 | 机器人 作为 | 机器人 不作为 | |
| 遵守 | 6.22 ± 2.42 | 4.98 ± 2.25 | 15.72 ± 8.94 | 12.94 ± 8.24 |
| 违反 | 2.50 ± 2.39 | 3.48 ± 2.76 | 6.16 ± 8.07 | 8.52 ± 8.37 |
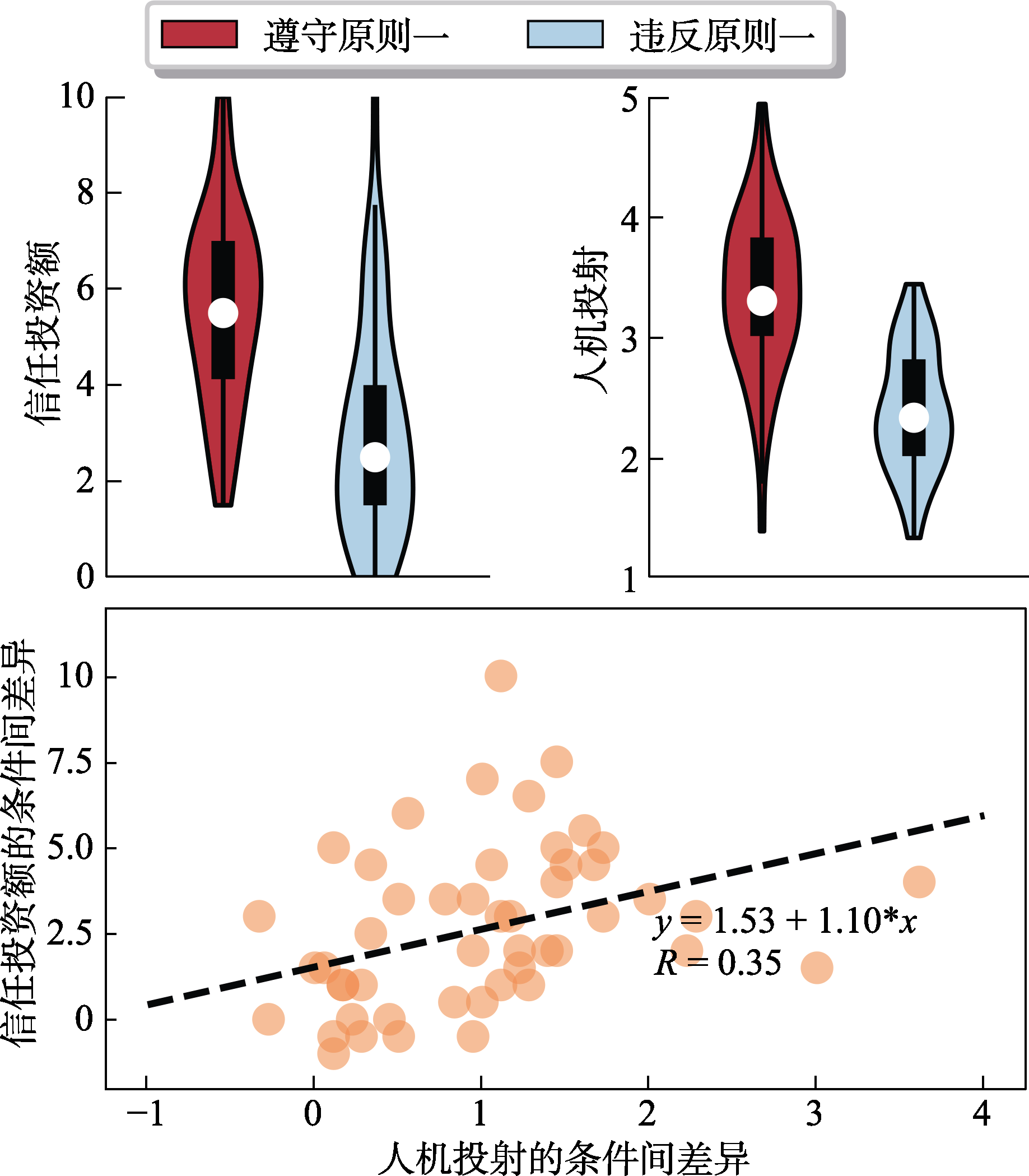
图3 实验1中机器人遵守与违反原则一条件下的信任投资额和人机投射 注: 小提琴图用于显示数据分布及其概率密度。图中, 白点为中位数, 中间的黑色粗条表示四分位数范围, 从其延伸的细黑线代表数据范围, 两端为最大值和最小值, 外部形状即为密度估计。下同
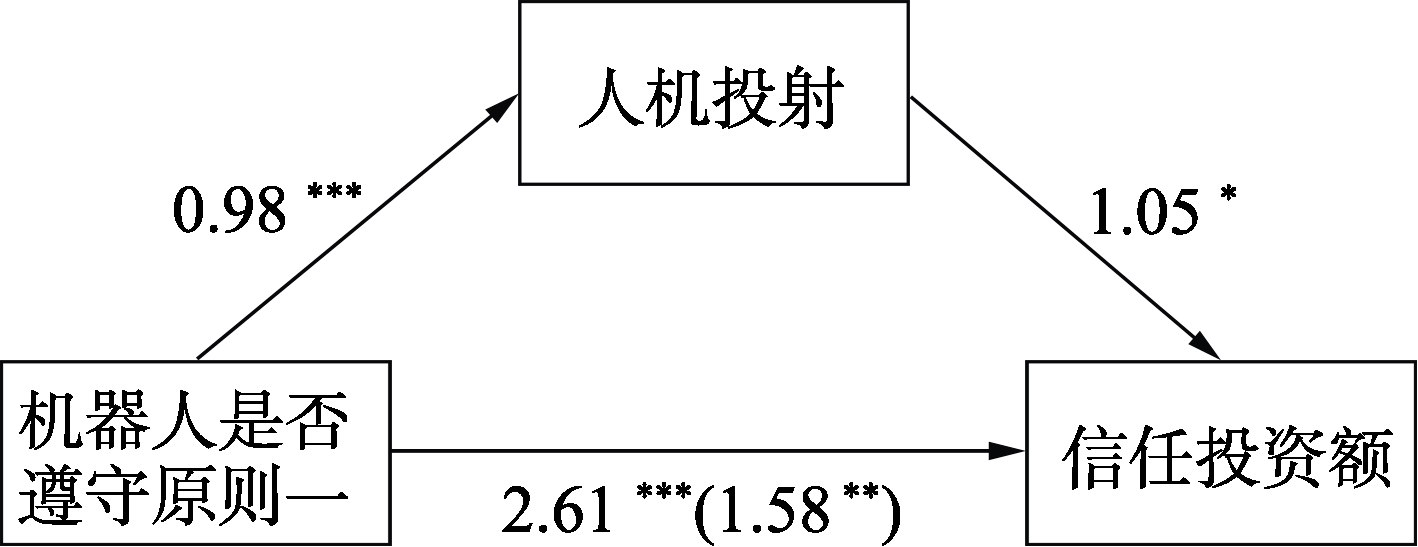
图4 实验1中人机投射在机器人是否遵守伦理原则一与信任投资额之间关系的中介效应 注: ***p < 0.001; **p < 0.01; *p < 0.05, 下同
| 机器人是否 遵守原则二 | 信任投资额 | 互惠预期 | ||
|---|---|---|---|---|
| 机器人服 从命令 | 机器人不 服从命令 | 机器人 服从命令 | 机器人不服 从命令 | |
| 遵守 | 6.38 ± 2.47 | 5.34 ± 2.78 | 19.96 ± 10.99 | 16.63 ± 10.15 |
| 违反 | 4.94 ± 2.80 | 2.10 ± 2.81 | 17.35 ± 11.29 | 5.39 ± 7.46 |
表3 实验2中不同实验条件下的信任投资额和互惠预期(M ± SD)
| 机器人是否 遵守原则二 | 信任投资额 | 互惠预期 | ||
|---|---|---|---|---|
| 机器人服 从命令 | 机器人不 服从命令 | 机器人 服从命令 | 机器人不服 从命令 | |
| 遵守 | 6.38 ± 2.47 | 5.34 ± 2.78 | 19.96 ± 10.99 | 16.63 ± 10.15 |
| 违反 | 4.94 ± 2.80 | 2.10 ± 2.81 | 17.35 ± 11.29 | 5.39 ± 7.46 |
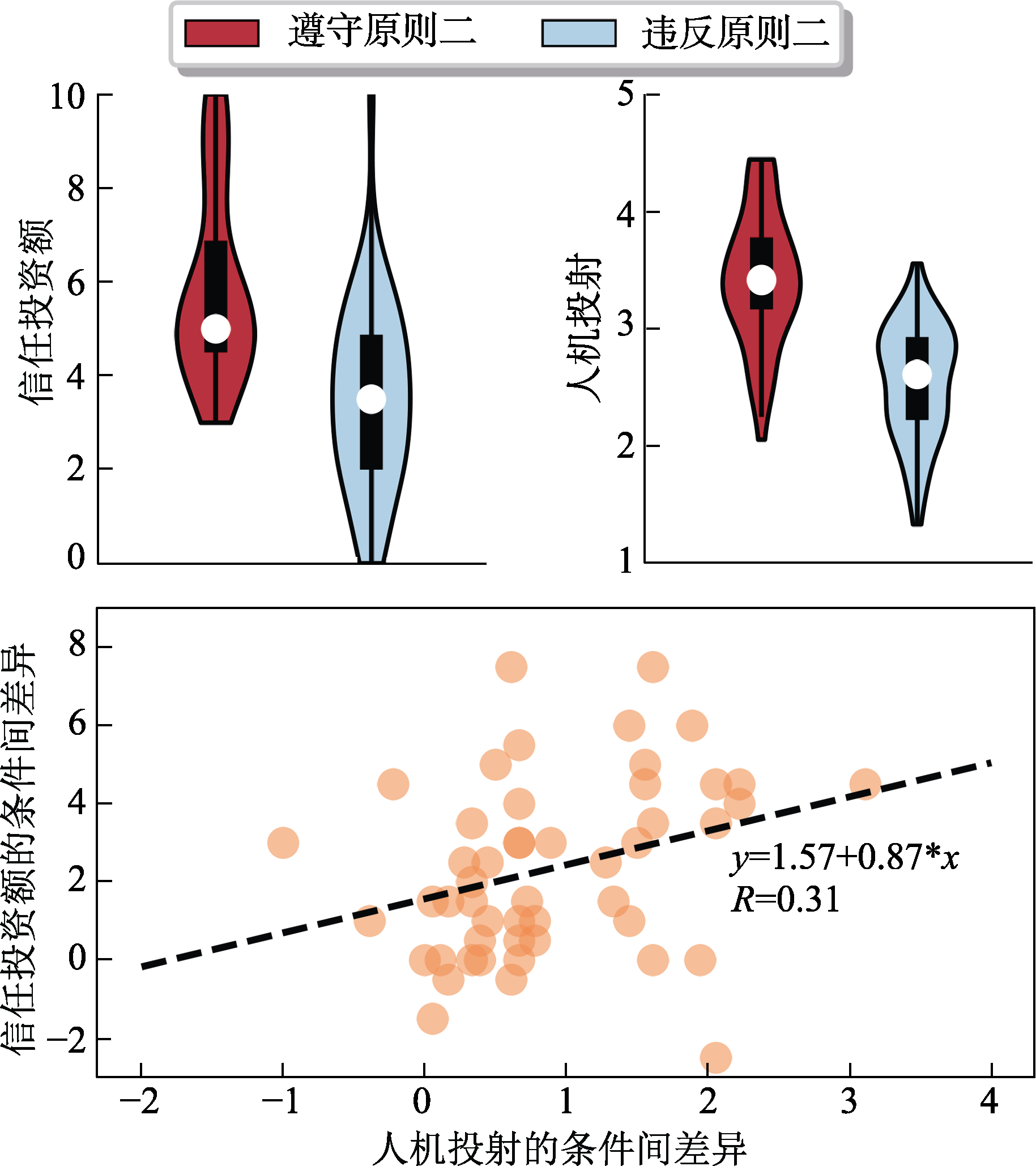
图5 实验2中机器人遵守和违反原则二条件下的信任投资额和人机投射
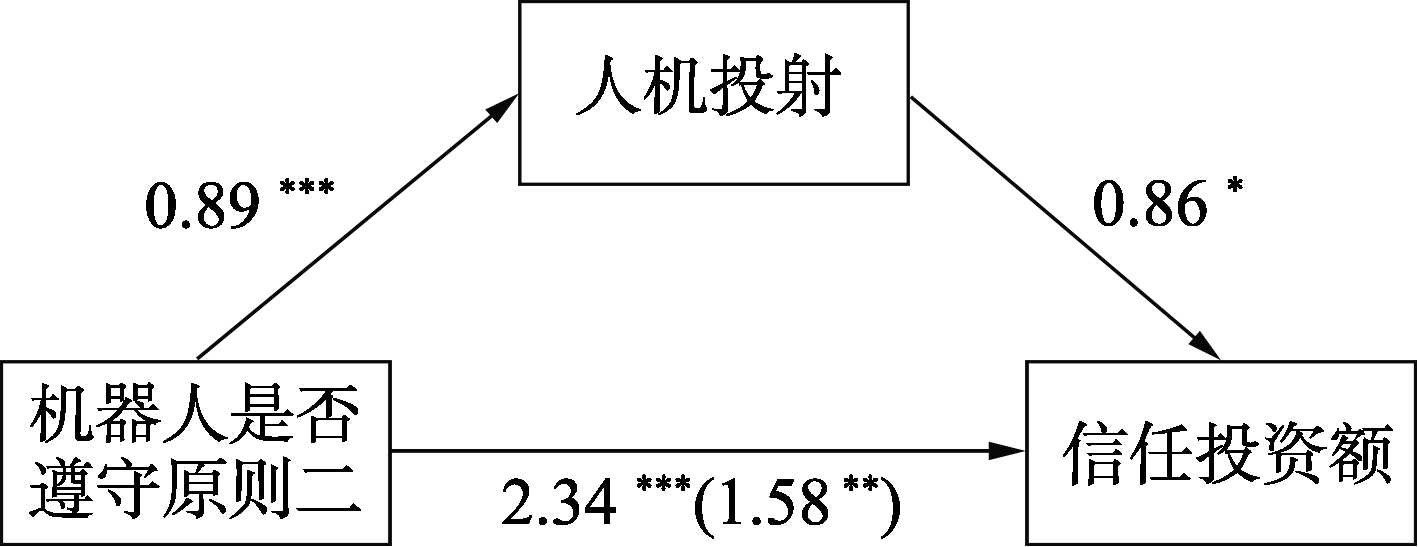
图6 实验2中人机投射在机器人是否遵守伦理原则二与信任投资额之间关系的中介效应
| 机器人 是否遵守 原则三 | 信任投资额 | 互惠预期 | ||
|---|---|---|---|---|
| 机器人保 护自身 | 机器人不 保护自身 | 机器人保 护自身 | 机器人不 保护自身 | |
| 遵守 | 6.71 ± 2.48 | 6.10 ± 2.73 | 18.44 ± 10.57 | 17.02 ± 11.02 |
| 违反 | 2.92 ± 2.89 | 3.67 ± 2.85 | 9.29 ± 11.18 | 9.80 ± 9.16 |
表4 实验3中不同实验条件下的信任投资额和互惠预期(M ± SD)
| 机器人 是否遵守 原则三 | 信任投资额 | 互惠预期 | ||
|---|---|---|---|---|
| 机器人保 护自身 | 机器人不 保护自身 | 机器人保 护自身 | 机器人不 保护自身 | |
| 遵守 | 6.71 ± 2.48 | 6.10 ± 2.73 | 18.44 ± 10.57 | 17.02 ± 11.02 |
| 违反 | 2.92 ± 2.89 | 3.67 ± 2.85 | 9.29 ± 11.18 | 9.80 ± 9.16 |
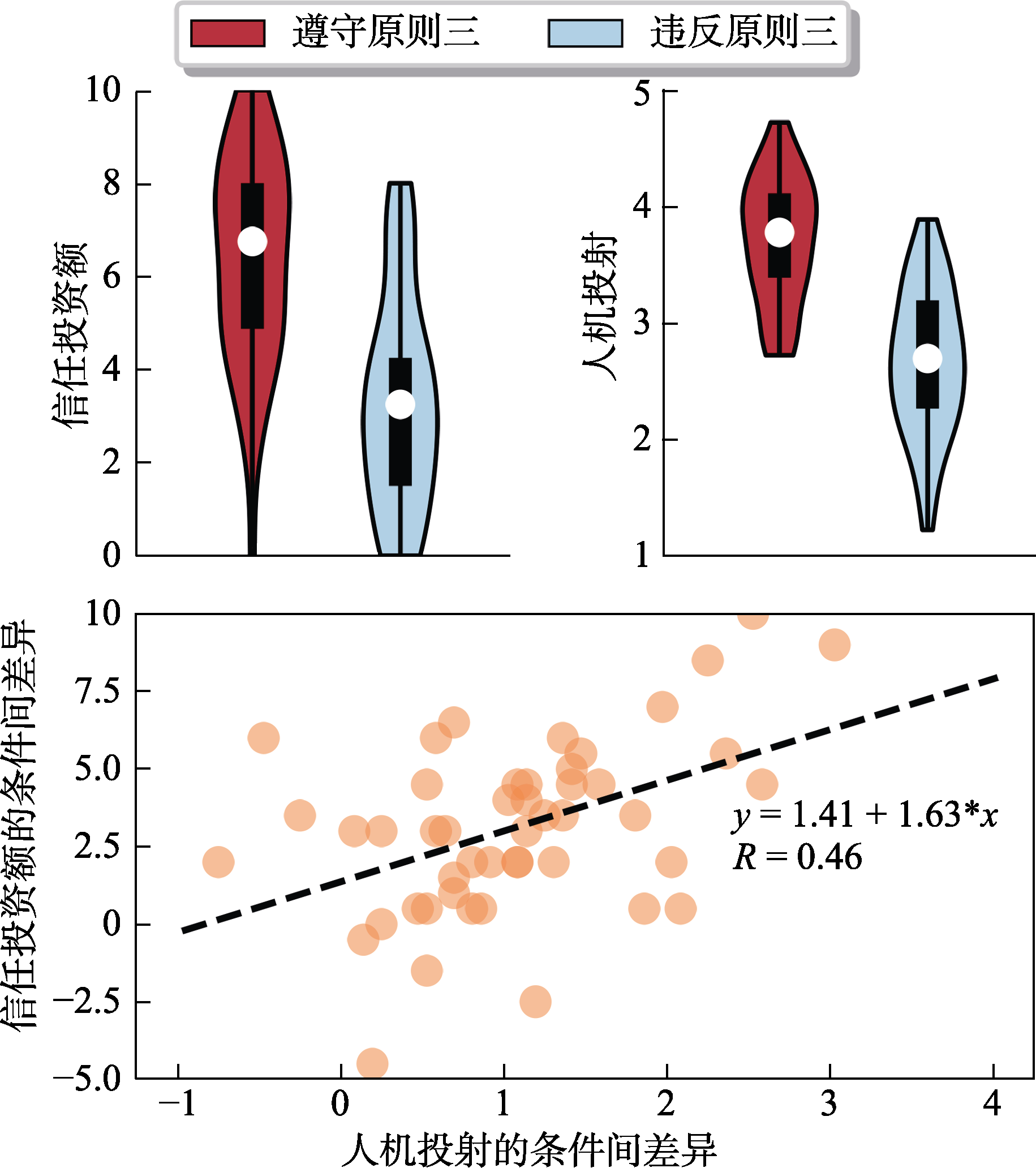
图7 实验3中机器人遵守与违反原则三条件下的信任投资额和人机投射
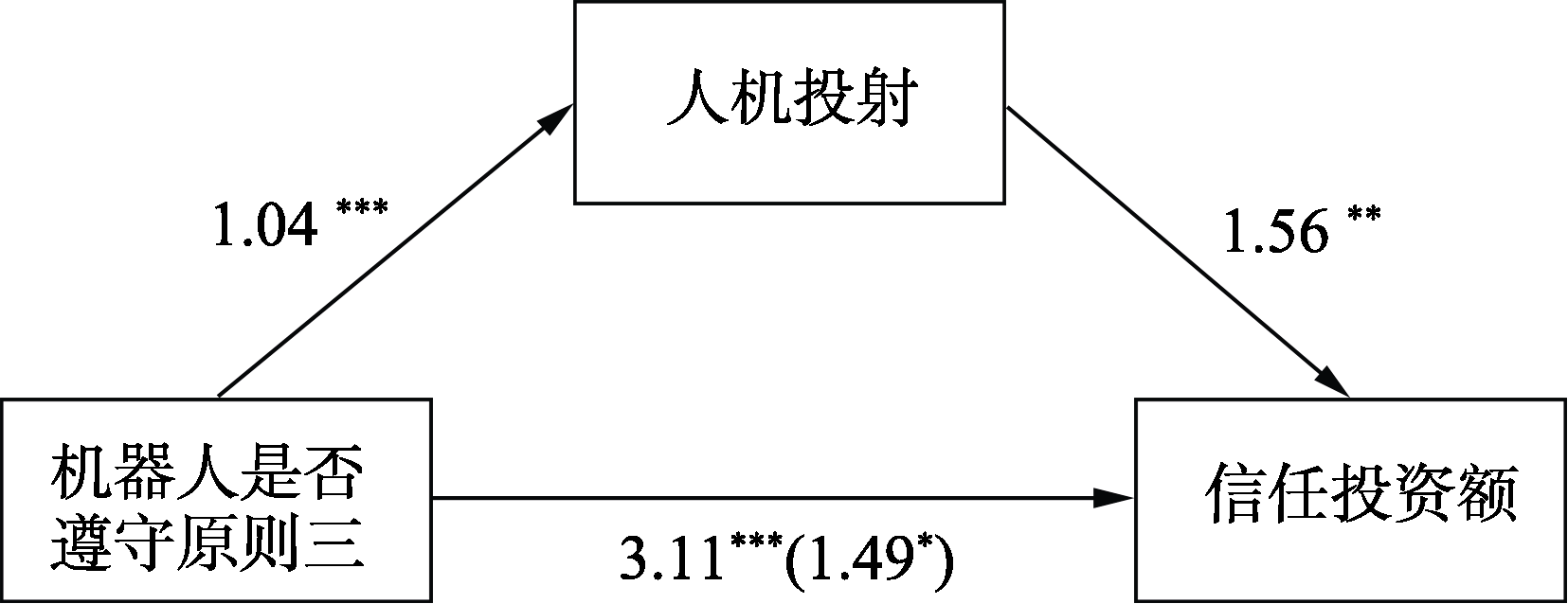
图8 实验3中人机投射在机器人是否遵守伦理原则三与信任投资额之间关系的中介效应
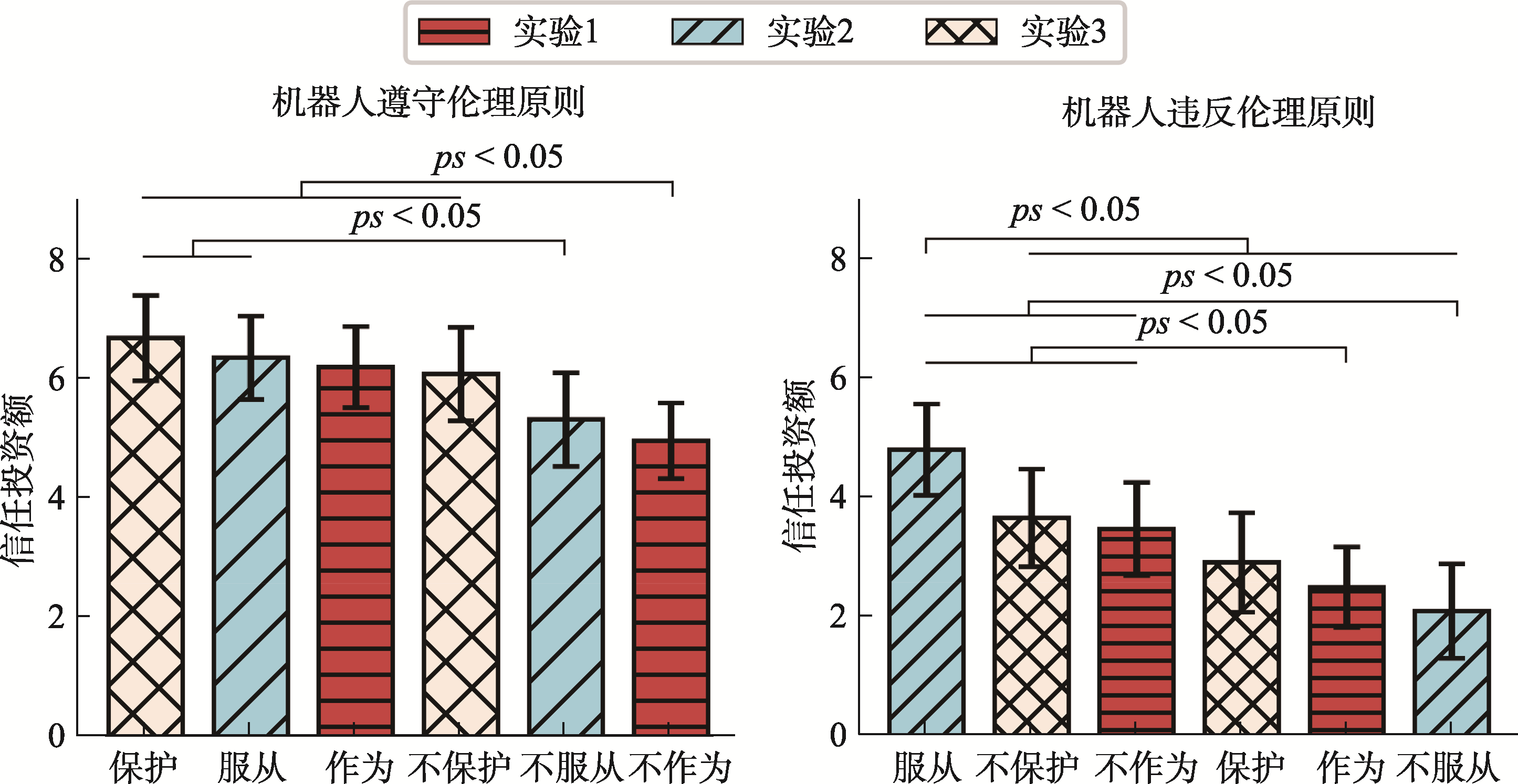
图9 机器人遵守和违反伦理原则情境下各决策类型条件的人机信任(M ± SE)
| 不同伦理要求的比较 | 实验条件 | 信任投资额 | t | df | p | Cohen's d |
|---|---|---|---|---|---|---|
| 要求一 vs. 要求二 | 遵守伦理但不服从命令(条件2-2) | 5.34 ± 2.78 | 0.85 | 49 | 0.401 | 0.12 |
| 违反伦理但服从命令(条件2-3) | 4.94 ± 2.80 | |||||
| 要求一 vs. 要求三 | 遵守伦理但不保护自身(条件3-2) | 6.10 ± 2.73 | 5.23 | 47 | < 0.001 | 0.75 |
| 违反伦理但保护自身(条件3-3) | 2.92 ± 2.89 | |||||
| 要求二 vs. 要求三 | 条件2-3 - 条件2-2 | −0.40 ± 3.34 | 3.63 | 96 | < 0.001 | 0.73 |
| 条件3-2 - 条件3-3 | −3.19 ± 4.23 |
表5 伦理要求冲突情境下机器人不同行动条件的信任投资额及其差异检验(M ± SD)
| 不同伦理要求的比较 | 实验条件 | 信任投资额 | t | df | p | Cohen's d |
|---|---|---|---|---|---|---|
| 要求一 vs. 要求二 | 遵守伦理但不服从命令(条件2-2) | 5.34 ± 2.78 | 0.85 | 49 | 0.401 | 0.12 |
| 违反伦理但服从命令(条件2-3) | 4.94 ± 2.80 | |||||
| 要求一 vs. 要求三 | 遵守伦理但不保护自身(条件3-2) | 6.10 ± 2.73 | 5.23 | 47 | < 0.001 | 0.75 |
| 违反伦理但保护自身(条件3-3) | 2.92 ± 2.89 | |||||
| 要求二 vs. 要求三 | 条件2-3 - 条件2-2 | −0.40 ± 3.34 | 3.63 | 96 | < 0.001 | 0.73 |
| 条件3-2 - 条件3-3 | −3.19 ± 4.23 |
| 项目 | 非常不同意 | 比较不同意 | 不确定 | 比较同意 | 非常同意 |
|---|---|---|---|---|---|
| 1. 我认为这个机器人能做出符合人类期望的行为 | 1 | 2 | 3 | 4 | 5 |
| 2. 我认为这个机器人拥有和人类相似的情感 | 1 | 2 | 3 | 4 | 5 |
| 3. 我认为这个机器人和人类一样有能力 | 1 | 2 | 3 | 4 | 5 |
| 4. 我认为这个机器人和人类一样有智慧 | 1 | 2 | 3 | 4 | 5 |
| 5. 我认为这个机器人的行为违反了人类的意图 | 1 | 2 | 3 | 4 | 5 |
| 6. 我认为这个机器人可以理解人类的情感 | 1 | 2 | 3 | 4 | 5 |
| 7. 我认为这个机器人和人类相比起来是愚蠢的 | 1 | 2 | 3 | 4 | 5 |
| 8. 我认为这个机器人是没有人情味的 | 1 | 2 | 3 | 4 | 5 |
| 9. 我认为这个机器人具备和人类相似的行动力 | 1 | 2 | 3 | 4 | 5 |
附表1 人机投射项目
| 项目 | 非常不同意 | 比较不同意 | 不确定 | 比较同意 | 非常同意 |
|---|---|---|---|---|---|
| 1. 我认为这个机器人能做出符合人类期望的行为 | 1 | 2 | 3 | 4 | 5 |
| 2. 我认为这个机器人拥有和人类相似的情感 | 1 | 2 | 3 | 4 | 5 |
| 3. 我认为这个机器人和人类一样有能力 | 1 | 2 | 3 | 4 | 5 |
| 4. 我认为这个机器人和人类一样有智慧 | 1 | 2 | 3 | 4 | 5 |
| 5. 我认为这个机器人的行为违反了人类的意图 | 1 | 2 | 3 | 4 | 5 |
| 6. 我认为这个机器人可以理解人类的情感 | 1 | 2 | 3 | 4 | 5 |
| 7. 我认为这个机器人和人类相比起来是愚蠢的 | 1 | 2 | 3 | 4 | 5 |
| 8. 我认为这个机器人是没有人情味的 | 1 | 2 | 3 | 4 | 5 |
| 9. 我认为这个机器人具备和人类相似的行动力 | 1 | 2 | 3 | 4 | 5 |
| [1] |
Ames, D. R. (2004). Strategies for social inference: A similarity contingency model of projection and stereotyping in attribute prevalence estimates. Journal of Personality and Social Psychology, 87(5), 573-585.
pmid: 15535772 |
| [2] |
Ames, D. R., Weber, E. U., & Zou, X. (2012). Mind-reading in strategic interaction: The impact of perceived similarity on projection and stereotyping. Organizational Behavior and Human Decision Processes, 117(1), 96-110.
doi: 10.1016/j.obhdp.2011.07.007 URL |
| [3] |
Ashrafian, H. (2015). AIonAI: A humanitarian law of artificial intelligence and robotics. Science and Engineering Ethics, 21(1), 29-40.
doi: 10.1007/s11948-013-9513-9 pmid: 24414678 |
| [4] | Asimov, I. (1942). Runaround. In I, Robot (p. 40). Doubleday. |
| [5] |
Awad, E., Dsouza, S., Kim, R., Schulz, J., Henrich, J., Shariff, A.,... Rahwan, I. (2018). The moral machine experiment. Nature, 563(7729), 59-64.
doi: 10.1038/s41586-018-0637-6 |
| [6] |
Babel, F., Kraus, J., Miller, L., Kraus, M., Wagner, N., Minker, W., & Baumann, M. (2021). Small talk with a robot? The impact of dialog content, talk initiative, and gaze behavior of a social robot on trust, acceptance, and proximity. International Journal of Social Robotics, 13(6), 1485-1498.
doi: 10.1007/s12369-020-00730-0 |
| [7] |
Bago, B., & De Neys, W. (2019). The intuitive greater good: Testing the corrective dual process model of moral cognition. Journal of Experimental Psychology: General, 148(10), 1782-1801.
doi: 10.1037/xge0000533 URL |
| [8] |
Banks, J. (2021). Good robots, bad robots: Morally valenced behavior effects on perceived mind, morality, and trust. International Journal of Social Robotics, 13(8), 2021-2038.
doi: 10.1007/s12369-020-00692-3 |
| [9] |
Bartneck, C., Kanda, T., Mubin, O., & Al Mahmud, A. (2009). Does the design of a robot influence its animacy and perceived intelligence? International Journal of Social Robotics, 1(2), 195-204.
doi: 10.1007/s12369-009-0013-7 URL |
| [10] |
Bigman, Y. E., & Gray, K. (2018). People are averse to machines making moral decisions. Cognition, 181, 21-34.
doi: S0010-0277(18)30208-7 pmid: 30107256 |
| [11] |
Bonezzi, A., Ostinelli, M., & Melzner, J. (2022). The human black-box: The illusion of understanding human better than algorithmic decision-making. Journal of Experimental Psychology: General, 151(9), 2250-2258.
doi: 10.1037/xge0001181 URL |
| [12] | Brendel, A. B., Mirbabaie, M., Lembcke, T.-B., & Hofeditz, L. (2021). Ethical management of artificial intelligence. Sustainability, 13(4), 1974. |
| [13] |
Cameron, D., de Saille, S., Collins, E. C., Aitken, J. M., Cheung, H., Chua, A.,... Law, J. (2021). The effect of social-cognitive recovery strategies on likability, capability and trust in social robots. Computers in Human Behavior, 114, 106561.
doi: 10.1016/j.chb.2020.106561 URL |
| [14] | Clarke, R. (1994). Asimov's laws of robotics: Implications for information technology. Computer, 26(12), 53-61. |
| [15] |
Cominelli, L., Feri, F., Garofalo, R., Giannetti, C., Meléndez- Jiménez, M. A., Greco, A.,... Kirchkamp, O. (2021). Promises and trust in human-robot interaction. Scientific Reports, 11, 9687.
doi: 10.1038/s41598-021-88622-9 pmid: 33958624 |
| [16] |
Etemad-Sajadi, R., Soussan, A., & Schöpfer, T. (2022). How ethical issues raised by human-robot interaction can impact the intention to use the robot? International Journal of Social Robotics, 14, 1103-1115.
doi: 10.1007/s12369-021-00857-8 |
| [17] | Fan, L., Scheutz, M., Lohani, M., McCoy, M., & Stokes, C. (2017). Do we need emotionally intelligent artificial agents? First results of human perceptions of emotional intelligence in humans compared to robots. In J. Beskow, C. Peters, G. Castellano, C. O'Sullivan, L. Leite, & S. Kopp (Eds.), Lecture notes in computer Science: Vol. 10498: Intelligent virtual agents (pp. 129-141). Springer. |
| [18] |
Fu, C., Zhang, Z., He, J. Z., Huang, S. L., Qiu, J. Y., & Wang, Y. W. (2018). Brain dynamics of decision-making in the generalized trust game: Evidence from ERPs and EEG time-frequency analysis. Acta Psychologica Sinica, 50(3), 317-326.
doi: 10.3724/SP.J.1041.2018.00317 URL |
| [付超, 张振, 何金洲, 黄四林, 仇剑崟, 王益文. (2018). 普遍信任博弈决策的动态过程——来自脑电时频分析的证据. 心理学报, 50(3), 317-326.] | |
| [19] | Gamez, P., Shank, D. B., Arnold, C., & North, M. (2020). Artificial virtue: The machine question and perceptions of moral character in artificial moral agents. AI & Society, 35(4), 795-809. |
| [20] | Gray, H. M., Gray, K., & Wegner, D. M. (2007). Dimensions of mind perception. Science, 315(5812), 619. |
| [21] |
Gray, K., & Wegner, D. M. (2012). Feeling robots and human zombies: Mind perception and the uncanny valley. Cognition, 125(1), 125-130.
doi: 10.1016/j.cognition.2012.06.007 pmid: 22784682 |
| [22] | Haring, K. S., Matsumoto, Y., & Watanabe, K. (2013, October). How do people perceive and trust a lifelike robot? In 2013 World Congress on Engineering and Computer Science (pp. 425-430). San Francisco, California, United States. |
| [23] |
Haslam, N. (2006). Dehumanization: An integrative review. Personality and Social Psychology Review, 10(3), 252-264.
doi: 10.1207/s15327957pspr1003_4 pmid: 16859440 |
| [24] | IEEE. (2019). Ethically aligned design: A vision for prioritizing human well-being with artificial intelligence and autonomous systems. Retrieved May 20, 2022, from https://ieeexplore.ieee.org/document/8058187 |
| [25] |
Johnson, A. M., & Axinn, S. (2013). The morality of autonomous robots. Journal of Military Ethics, 12(2), 129-141.
doi: 10.1080/15027570.2013.818399 URL |
| [26] |
Judd, C. M., Kenny, D. A., & McClelland, G. H. (2001). Estimating and testing mediation and moderation in within-subject designs. Psychological Methods, 6, 115-134.
pmid: 11411437 |
| [27] |
Kaminka, G. A., Spokoini-Stern, R., Amir, Y., Agmon, N., & Bachelet, I. (2017). Molecular robots obeying Asimov’s three laws of robotics. Artificial Life, 23(3), 343-350.
doi: 10.1162/ARTL_a_00235 pmid: 28786728 |
| [28] | Khavas, Z. R., Ahmadzadeh, S. R., & Robinette, P. (2020). Modeling trust in human-robot interaction:A survey. In A. R. Wagner, D. Feil-Seifer, K. S. Haring, S. Rossi, T. Williams, H. He, & S. Sam Ge (Eds.), Lecture notes in computer science: Vol. 12483: Social robotics (pp. 529-541). Springer. |
| [29] | Krueger, J. (2000). The projective perception of the social world. In J. Suls & L. Wheeler (Eds.), The Springer series in social clinical psychology: Handbook of social comparison (pp. 323-351). Springer. |
| [30] |
Laakasuo, M., Palomäki, J., & Köbis, N. (2021). Moral uncanny valley: A robot’s appearance moderates how its decisions are judged. International Journal of Social Robotics, 13(7), 1679-1688.
doi: 10.1007/s12369-020-00738-6 |
| [31] |
Lee, J. D., & See, K. A. (2004). Trust in automation: Designing for appropriate reliance. Human Factors, 46(1), 50-80.
doi: 10.1518/hfes.46.1.50_30392 pmid: 15151155 |
| [32] | Madhavan, P., & Wiegmann, D. A. (2004). A new look at the dynamics of human-automation trust:Is trust in humans comparable to trust in machines? Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 48(3), 581-585. |
| [33] | Malle, B. F., & Ullman, D. (2021). A multidimensional conception and measure of human-robot trust. In C. S. Nam, & J. B. Lyons (Eds.), Trust in Human-Robot Interaction (pp. 3-25). Academic Press. |
| [34] | Malle, B. F., Scheutz, M., Arnold, T., Voiklis, J., & Cusimano, C. (2015, March). Sacrifice one for the good of many? People apply different moral norms to human and robot agents. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (pp.117-124). Portland, Oregon, United States. |
| [35] | Malle, B. F., Scheutz, M., Forlizzi, J., & Voiklis, J. (2016, March). Which robot am I thinking about? The impact of action and appearance on people’s evaluations of a moral robot. In 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (pp. 125-132). Christchurch, New Zealand. |
| [36] |
Maninger, T., & Shank, D. B. (2022). Perceptions of violations by artificial and human actors across moral foundations. Computers in Human Behavior Reports, 5, 100154.
doi: 10.1016/j.chbr.2021.100154 URL |
| [37] | Milli, S., Hadfield-Menell, D., Dragan, A., & Russell, S. (2017, August). Should robots be obedient? In Proceedings of the 26th International Joint Conference on Artificial Intelligence (pp. 4754-4760). Melbourne, Australia. |
| [38] |
Montoya, A. K., & Hayes, A. F. (2017). Two-condition within- participant statistical mediation analysis: A path-analytic framework. Psychological Methods, 22(1), 6-27.
doi: 10.1037/met0000086 pmid: 27362267 |
| [39] |
Mor, S., Toma, C., Schweinsberg, M., & Ames, D. (2019). Pathways to intercultural accuracy: Social projection processes and core cultural values. European Journal of Social Psychology, 49(1), 47-62.
doi: 10.1002/ejsp.2019.49.issue-1 URL |
| [40] |
Parasuraman, R., & Riley, V. (1997). Humans and automation: Use, misuse, disuse, abuse. Human Factors, 39(2), 230-253.
doi: 10.1518/001872097778543886 URL |
| [41] | Reeves, B., & Nass, C. I. (1996). The media equation: How people treat computers, television, and new media like real people and places. Cambridge University Press. |
| [42] |
Schein, C., & Gray, K. (2018). The theory of dyadic morality: Reinventing moral judgment by redefining harm. Personality and Social Psychology Review, 22(1), 32-70.
doi: 10.1177/1088868317698288 pmid: 28504021 |
| [43] | Shank, D. B., DeSanti, A., & Maninger, T. (2019). When are artificial intelligence versus human agents faulted for wrongdoing? Moral attributions after individual and joint decisions. Information, Communication & Society, 22(5), 648-663. |
| [44] |
Vanderelst, D., & Winfield, A. (2018). An architecture for ethical robots inspired by the simulation theory of cognition. Cognitive Systems Research, 48, 56-66.
doi: 10.1016/j.cogsys.2017.04.002 URL |
| [45] |
Wang, Y. W., Fu, C., Ren, X. F., Lin, Y. Z., Guo, F. B., Zhang, Z.,... Zheng, Y. W. (2017). Narcissistic personality modulates outcome evaluation in the trust game. Acta Psychologica Sinica, 49(8), 1080-1088.
doi: 10.3724/SP.J.1041.2017.01080 URL |
| [王益文, 付超, 任相峰, 林羽中, 郭丰波, 张振,... 郑玉玮. (2017). 自恋人格调节信任博弈的结果评价. 心理学报, 49(8), 1080-1088.] | |
| [46] |
Waytz, A. (2014). The mind in the machine: Anthropomorphism increases trust in an autonomous vehicle. Journal of Experimental Social Psychology, 52, 113-117.
doi: 10.1016/j.jesp.2014.01.005 URL |
| [47] | Zhao, T. Y. (2015). The forking paths for the trolley problem. Philosophical Research, 5, 96-102. |
| [赵汀阳. (2015). 有轨电车的道德分叉. 哲学研究, 5, 96-102.] | |
| [48] | Zhu, J. (2013). Have experimental studies in cognitive science indicate the connsequentialism?——A reply on the attack of Joshua Greene to Kantian ethics. Academic Monthly, 45(1), 56-62. |
| [朱菁. (2013). 认知科学的实验研究表明道义论哲学是错误的吗?——评加西华·格林对康德伦理学的攻击. 学术月刊, 45(1), 56-62. ] |
| [1] | 王国轩, 龙立荣, 李绍龙, 孙芳, 望家晴, 黄世英子. 负面绩效反馈下员工绩效改进动机的人机比较[J]. 心理学报, 2025, 57(2): 298-314. |
| [2] | 滕玥, 张昊天, 赵偲琪, 彭凯平, 胡晓檬. 多元文化经历提升人类对机器人的利他行为及心智知觉的中介作用[J]. 心理学报, 2024, 56(2): 146-160. |
| [3] | 黄昕杰, 张弛, 万华根, 张灵聪. 情绪效价可预测性对时间捆绑效应的影响[J]. 心理学报, 2023, 55(1): 36-44. |
| [4] | 邓成龙, 耿鹏, 蒯曙光. 三维虚拟空间中转头选中远离和靠近运动目标的操作特性差异[J]. 心理学报, 2023, 55(1): 9-21. |
| [5] | 范亮艳;范晓芳;罗位超;吴功航;严序;尹大志;吕岳;朱君明;徐冬溶. 艺术设计中创造性思维的fMRI研究:一项基于智能CAD的探索[J]. 心理学报, 2014, 46(4): 427-436 . |
| [6] | 李金波,许百华,田学红. 人机交互中认知负荷变化预测模型的构建[J]. 心理学报, 2010, 42(05): 559-568. |
| [7] | 李金波,许百华. 人机交互过程中认知负荷的综合测评方法[J]. 心理学报, 2009, 41(01): 35-43. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||