ISSN 1671-3710
CN 11-4766/R
主办:中国科学院心理研究所
出版:科学出版社
CN 11-4766/R
主办:中国科学院心理研究所
出版:科学出版社
心理科学进展 ›› 2021, Vol. 29 ›› Issue (12): 2172-2183.doi: 10.3724/SP.J.1042.2021.02172 cstr: 32111.14.2021.02172
高在峰1( ), 李文敏1, 梁佳文1, 潘晗希1, 许为2, 沈模卫1
), 李文敏1, 梁佳文1, 潘晗希1, 许为2, 沈模卫1
收稿日期:2020-12-27
发布日期:2021-10-26
基金资助:
GAO Zaifeng1(), LI Wenmin1, LIANG Jiawen1, PAN Hanxi1, XU Wei2, SHEN Mowei1
Received:2020-12-27
Published:2021-10-26
摘要:
自动驾驶是当前智能汽车发展的重要方向。在实现完全自动化驾驶前, 驾驶员和自动驾驶系统共享车辆控制权, 协同完成驾驶任务。在该人-机共驾阶段, 人对自动驾驶系统的信任是影响自动驾驶中人机协同效率与驾驶安全的关键要素; 驾驶员对自动驾驶车辆保持适当的信任水平对驾驶安全至关重要。本研究结合信任的发展阶段与影响因素提出了动态信任框架。该框架将信任发展分为倾向性信任、初始信任、实时信任和事后信任四个发展阶段, 并结合操作者特征(人)、系统特征(自动驾驶车系统)、情境特征(环境)三个关键因素分析不同阶段的核心影响因素以及彼此间的内在关联。根据该框架, 信任校准可从监测矫正、驾驶员训练、优化HMI设计三类途径展开。未来研究应更多关注驾驶员和人机系统设计特征对信任的影响, 考察信任的实时测量和功能特异性, 探讨驾驶员和系统的相互信任机制, 以及提升信任研究的外部效度。
中图分类号:
高在峰, 李文敏, 梁佳文, 潘晗希, 许为, 沈模卫. (2021). 自动驾驶车中的人机信任. 心理科学进展 , 29(12), 2172-2183.
GAO Zaifeng, LI Wenmin, LIANG Jiawen, PAN Hanxi, XU Wei, SHEN Mowei. (2021). Trust in automated vehicles. Advances in Psychological Science, 29(12), 2172-2183.
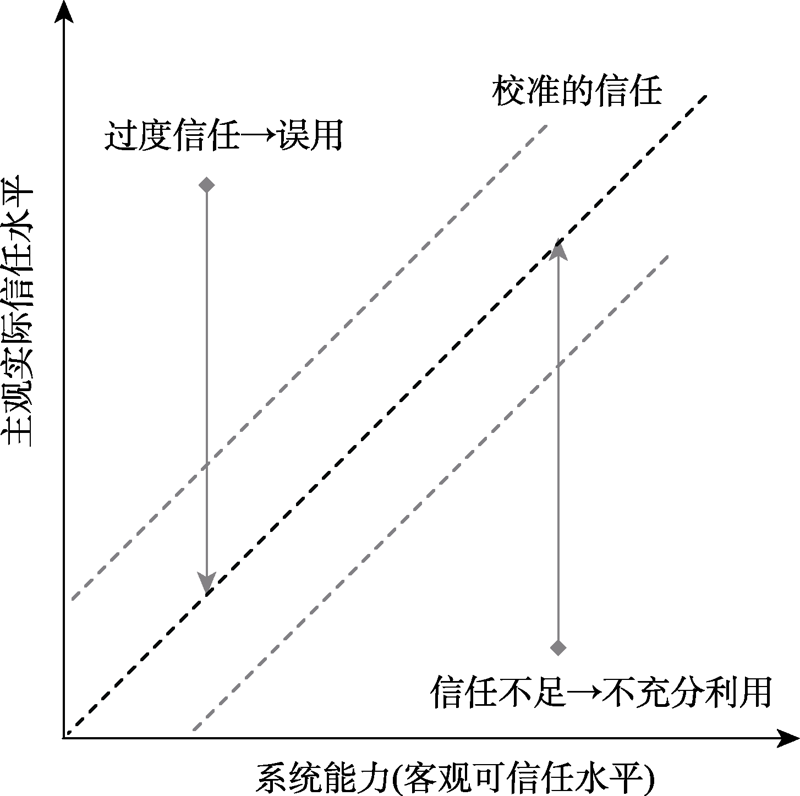
图1 系统能力与主观实际信任水平间的关系(改编于de Visser et al., 2014; Lee & See, 2004)。图中灰色虚线区域表示在实际应用中, 信任校准存在一个信任水平不合适但可恢复或安全的区域(具体范围有待进一步探讨)。
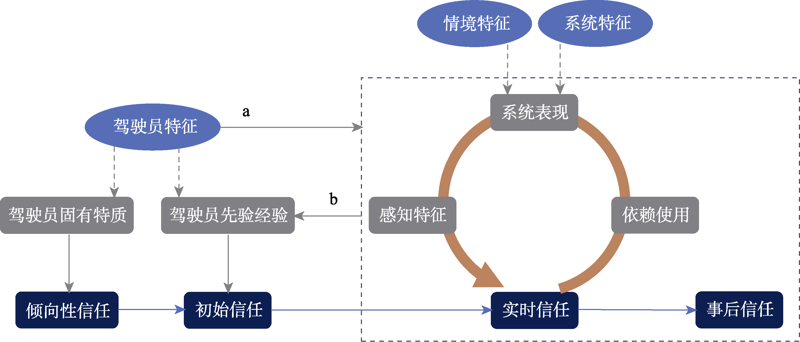
图2 基于信任发展过程的自动驾驶动态信任框架。a线表示驾驶员特征影响除系统表现外的其他所有四个因素, b线表示框中所有因素均可转化为驾驶员的先验经验。
| [1] | 施彦玮. (2019). 环境知觉对L2自动驾驶人机信任的影响 (硕士学位论文). 浙江大学, 杭州, |
| [2] | 许为. (2019). 四论以用户为中心的设计:以人为中心的人工智能. 应用心理学, 25(4), 291-305. |
| [3] | 许为. (2020). 五论以用户为中心的设计:从自动化到智能时代的自主化以及自动驾驶车. 应用心理学, 26(2), 108-128. |
| [4] | Adams, B. D., Bruyn, L. E., Houde, S., Angelopoulos, P., Iwasa-Madge, K., & McCann, C.(2003). Trust in automated systems. Toronto: Ministry of National Defence, |
| [5] |
Anderson, J. R., Bothell, D., Byrne, M. D., Douglass, S., Lebiere, C., & Qin, Y. L.(2004). An integrated theory of the mind. Psychological Review, 111(4), 1036-1060.
pmid: 15482072 |
| [6] |
Armstrong, S. J., Peterson, E. R., & Rayner, S. G.(2012). Understanding and defining cognitive style and learning style: A Delphi study in the context of educational psychology. Educational Studies, 38(4), 449-455.
doi: 10.1080/03055698.2011.643110 URL |
| [7] |
Awad, E., Dsouza, S., Kim, R., Schulz, J., Henrich, J., Shariff, A., ... Rahwan, I.(2018). The moral machine experiment. Nature, 563(7729), 59-64.
doi: 10.1038/s41586-018-0637-6 URL |
| [8] |
Beggiato, M., & Krems, J. F.(2013). The evolution of mental model, trust and acceptance of adaptive cruise control in relation to initial information. Transportation Research Part F: Traffic Psychology and Behaviour, 18, 47-57.
doi: 10.1016/j.trf.2012.12.006 URL |
| [9] | Brown, R. D., & Galster, S. M.(2004, September). Effects of reliable and unreliable automation on subjective measures of mental workload, situation awareness, trust and confidence in a dynamic flight task. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 48, No. 1, pp. 147-151). Sage CA: Los Angeles, CA: SAGE Publications. |
| [10] | Cao, S., Qin, Y. L., & Shen, M. W.(2013). Modeling the effect of driving experience on lane keeping performance using ACT-R cognitive architecture. Chinese Science Bulletin, 58(21), 2078-2086. |
| [11] | Carlson, M. S., Drury, J. L., Desai, M., Kwak, H., & Yanco, H. A.(2014, March). Identifying factors that influence trust in automated cars and medical diagnosis systems. In 2014 AAAI Spring Symposium Series, |
| [12] | Celmer, N., Branaghan, R., & Chiou, E.(2018, September). Trust in branded autonomous vehicles & performance expectations: A theoretical framework. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 62, No. 1, pp. 1761-1765). Sage CA: Los Angeles, CA: SAGE Publications. |
| [13] | Chen, F., Ren, Q., Gao, Z., Wen, Z., & Yang, H.(2021). Unsettled issues in vehicle autonomy, artificial intelligence, and human-machine interaction. SAE Technical Paper, |
| [14] |
Chen, J. Y. C., Lakhmani, S. G., Stowers, K., Selkowitz, A. R., Wright, J. L., & Barnes, M.(2018). Situation awareness-based agent transparency and human-autonomy teaming effectiveness. Theoretical Issues in Ergonomics Science, 19(3), 259-282.
doi: 10.1080/1463922X.2017.1315750 URL |
| [15] | Chien, S. Y., Lewis, M., Semnani-Azad, Z., & Sycara, K.(2014, September). An empirical model of cultural factors on trust in automation. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 58, No. 1, pp. 859-863). Sage CA: Los Angeles, CA: SAGE Publications. |
| [16] | Chien, S. Y., Semnani-Azad, Z., Lewis, M., & Sycara, K.(2014, June). Towards the development of an inter-cultural scale to measure trust in automation. In International conference on cross-cultural design (pp. 35-46). Springer, Cham. |
| [17] | Chien, S. Y., Sycara, K., Liu, J. S., & Kumru, A.(2016, September). Relation between trust attitudes toward automation, Hofstede's cultural dimensions, and big five personality traits. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 60, No. 1, pp. 841-845). Sage CA: Los Angeles, CA: SAGE Publications. |
| [18] |
Choi, J. K., & Ji, Y. G.(2015). Investigating the importance of trust on adopting an autonomous vehicle. International Journal of Human-Computer Interaction, 31(10), 692-702.
doi: 10.1080/10447318.2015.1070549 URL |
| [19] | Cohen, M. S., Parasuraman, R., Serfaty, D., & Andes, R. C.(1997). Trust in decision aids: A model and a training strategy. Arlington, VA: Cognitive Technologies, Inc. |
| [20] | Cramer, H., Evers, V., Kemper, N., & Wielinga, B.(2008, December). Effects of autonomy, traffic conditions and driver personality traits on attitudes and trust towards in-vehicle agents. In 2008 IEEE/WIC/ACM International Conference on Web Intelligence and Intelligent Agent Technology (Vol. 3, pp. 477-482)IEEE. |
| [21] | de Visser, E. J., Cohen, M., Freedy, A., & Parasuraman, R.(2014, June). A design methodology for trust cue calibration in cognitive agents. In International conference on virtual, augmented and mixed reality (pp. 251-262). Springer, Cham. |
| [22] |
de Visser, E. J., Pak, R., & Shaw, T. H.(2018). From ‘automation' to ‘autonomy': The importance of trust repair in human-machine interaction. Ergonomics, 61(10), 1409-1427.
doi: 10.1080/00140139.2018.1457725 pmid: 29578376 |
| [23] |
de Vries, P., Midden, C., & Bouwhuis, D.(2003). The effects of errors on system trust, self-confidence, and the allocation of control in route planning. International Journal of Human Computer Studies, 58(6), 719-735.
doi: 10.1016/S1071-5819(03)00039-9 URL |
| [24] |
Donmez, B., Boyle, L. N., Lee, J. D., & McGehee, D. V.(2006). Drivers' attitudes toward imperfect distraction mitigation strategies. Transportation Research Part F: Traffic Psychology and Behaviour, 9(6), 387-398.
doi: 10.1016/j.trf.2006.02.001 URL |
| [25] | DOT, U.(2018). Preparing for the future of transportation: Automated vehicles 3. 0. Retrieved December 25, 2020, from https://www.transportation.gov/policy-initiatives/automated-vehicles/av-40 |
| [26] |
Du, N., Haspiel, J., Zhang, Q. N., Tilbury, D., Pradhan, A., Yang, J., & Robert, L.(2019). Look who's talking now: Implications of AV's explanations on driver's trust, AV preference, anxiety and mental workload. Transportation Research Part C: Emerging Technologies, 104, 428-442.
doi: 10.1016/j.trc.2019.05.025 URL |
| [27] |
Ekman, F., Johansson, M., Bligård, L. O., Karlsson, M., & Strömberg, H.(2019). Exploring automated vehicle driving styles as a source of trust information. Transportation Research Part F: Traffic Psychology and Behaviour, 65, 268-279.
doi: 10.1016/j.trf.2019.07.026 URL |
| [28] | Ekman, F., Johansson, M., & Sochor, J.(2016, October). To See or Not to See: The Effect of Object Recognition on Users' Trust in" Automated Vehicles". In Proceedings of the 9th Nordic Conference on Human-Computer Interaction (pp. 1-4), Gothenburg, Sweden, |
| [29] |
Ekman, F., Johansson, M., & Sochor, J.(2018). Creating appropriate trust in automated vehicle systems: A framework for HMI design. IEEE Transactions on Human-Machine Systems, 48(1), 95-101.
doi: 10.1109/THMS.2017.2776209 URL |
| [30] |
Endsley, M. R.(1995). Toward a theory of situation awareness in dynamic systems. Human Factors: The Journal of the Human Factors and Ergonomics Society, 37(1), 32-64.
doi: 10.1518/001872095779049543 URL |
| [31] | Endsley, M. R.(2016). Designing for situation awareness: An approach to user-centered design (2ed.). CRC press. |
| [32] |
Epley, N., Waytz, A., & Cacioppo, J. T.(2007). On seeing human: A three-factor theory of anthropomorphism. Psychological Review, 114(4), 864-886.
doi: 10.1037/0033-295X.114.4.864 URL |
| [33] | European Road Transport Research Advisory Council ERTRAC working group. (2019). Connected Automated Driving Roadmap. ERTRAC, |
| [34] | Fahrenfort, J. J., van Driel, J., van Gaal, S., & Olivers, C. N. L.(2018). From ERPs to MVPA Using the Amsterdam Decoding and Modeling Toolbox (ADAM). Frontiers in Neuroscience, 12. |
| [35] | Forster, Y., Naujoks, F., & Neukum, A.(2017, June) Increasing anthropomorphism and trust in automated driving functions by adding speech output. In 2017 IEEE Intelligent Vehicles Symposium (pp. 365-372). IEEE. |
| [36] | French, B., Duenser, A., Heathcote, A.(2018). Trust in Automation - A Literature Review. CSIRO, Australia. |
| [37] | Gao, J., & Lee, J. D.(2006). Extending the decision field theory to model operators' reliance on automation in supervisory control situations. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 36(5), 943-959. |
| [38] |
Gold, C., Körber, M., Hohenberger, C., Lechner, D., & Bengler, K.(2015). Trust in automation-before and after the experience of take-over scenarios in a highly automated vehicle. Procedia Manufacturing, 3, 3025-3032.
doi: 10.1016/j.promfg.2015.07.847 URL |
| [39] |
Hancock, P. A., Billings, D. R., Schaefer, K. E., Chen, J. Y. C., de Visser, E. J.,& Parasuraman, R.(2011). A meta-analysis of factors affecting trust in human-robot interaction. Human Factors: The Journal of the Human Factors and Ergonomics Society, 53(5), 517-527.
doi: 10.1177/0018720811417254 URL |
| [40] |
Hancock, P. A., Nourbakhsh, I., & Stewart, J.(2019). On the future of transportation in an era of automated and autonomous vehicles. Proceedings of the National Academy of Sciences, 116(16), 7684-7691.
doi: 10.1073/pnas.1805770115 URL |
| [41] |
Hartwich, F., Beggiato, M., & Krems, J. F.(2018). Driving comfort, enjoyment and acceptance of automated driving-effects of drivers' age and driving style familiarity. Ergonomics, 61(8), 1017-1032.
doi: 10.1080/00140139.2018.1441448 URL |
| [42] | Häuslschmid, R., von Bülow, M., Pfleging, B., & Butz, A.(2017, March). Supporting trust in autonomous driving. In Proceedings of the 22nd international conference on intelligent user interfaces (pp. 319-329). ACM. |
| [43] |
Haxby, J. V., Connolly, A. C., & Guntupalli, J. S.(2014). Decoding neural representational spaces using multivariate pattern analysis. Annual Review of Neuroscience, 37(1), 435-456.
doi: 10.1146/neuro.2014.37.issue-1 URL |
| [44] | Helldin, T., Falkman, G., Riveiro, M., & Davidsson, S.(2013, October). Presenting system uncertainty in automotive UIs for supporting trust calibration in autonomous driving. In Proceedings of the 5th international conference on automotive user interfaces and interactive vehicular applications (pp. 210-217). ACM. |
| [45] |
Hergeth, S., Lorenz, L., & Krems, J. F.(2017). Prior familiarization with takeover requests affects drivers' takeover performance and automation trust. Human Factors: The Journal of the Human Factors and Ergonomics Society, 59(3), 457-470.
doi: 10.1177/0018720816678714 URL |
| [46] | Hergeth, S., Lorenz, L., Krems, J. F., & Toenert, L.(2015). Effects of take-over requests and cultural background on automation trust in highly automated driving. In Proceedings of the eighth international driving symposium on human factors in driver assessment, training and vehicle design (pp.331-337). University of Iowa. |
| [47] |
Hergeth, S., Lorenz, L., Vilimek, R., & Krems, J. F.(2016). Keep your scanners peeled: Gaze behavior as a measure of automation trust during highly automated driving. Human Factors: The Journal of the Human Factors and Ergonomics Society, 58(3), 509-519.
doi: 10.1177/0018720815625744 URL |
| [48] |
Hoff, K. A., & Bashir, M.(2015). Trust in automation: Integrating empirical evidence on factors that influence trust. Human Factors: The Journal of the Human Factors and Ergonomics Society, 57(3), 407-434.
doi: 10.1177/0018720814547570 URL |
| [49] |
Jian, J. Y., Bisantz, A. M., & Drury, C. G.(2000). Foundations for an empirically determined scale of trust in automated systems. International Journal of Cognitive Ergonomics, 4(1), 53-71.
doi: 10.1207/S15327566IJCE0401_04 URL |
| [50] | Jonsson, I. M., Harris, H., & Nass, C.(2008, April). How accurate must an in-car information system be?: Consequences of accurate and inaccurate information in cars. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems(pp.1665-1674). ACM. |
| [51] | Kelleher, K.(2018). Man arrested for drunk driving after officers found him asleep in Tesla running in autopilot mode. Retrieved December 25, 2020, from http://fortune.com/2018/11/30/man-arrested-drunk-driving-asleep-tesla-autopilot-mode/ |
| [52] | Khastgir, S., Birrell, S., Dhadyalla, G., & Jennings, P.(2017). Calibrating trust to increase the use of automated systems in a vehicle. In Advances in human aspects of transportation (pp. 535-546). Springer, Cham. |
| [53] | Kohn, S. C., Quinn, D., Pak, R., de Visser, E. J., & Shaw, T. H.(2018, September). Trust Repair Strategies with Self-Driving Vehicles: An Exploratory Study. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 62, No. 1, pp. 1108-1112). Sage CA: Los Angeles, CA: SAGE Publications. |
| [54] |
Koo, J., Kwac, J., Ju, W., Steinert, M., Leifer, L., & Nass, C.(2015). Why did my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance. International Journal on Interactive Design and Manufacturing, 9(4), 269-275.
doi: 10.1007/s12008-014-0227-2 URL |
| [55] |
Körber, M., Baseler, E., & Bengler, K.(2018). Introduction matters: Manipulating trust in automation and reliance in automated driving. Applied Ergonomics, 66, 18-31.
doi: 10.1016/j.apergo.2017.07.006 URL |
| [56] |
Kraus, J., Scholz, D., Stiegemeier, D., & Baumann, M.(2020). The more you know: Trust dynamics and calibration in highly automated driving and the effects of take-overs, system malfunction, and system transparency. Human Factors: The Journal of the Human Factors and Ergonomics Society, 62(5), 718-736.
doi: 10.1177/0018720819853686 URL |
| [57] |
Kunze, A., Summerskill, S. J., Marshall, R., & Filtness, A. J.(2019). Automation transparency: Implications of uncertainty communication for human-automation interaction and interfaces. Ergonomics, 62(3), 345-360.
doi: 10.1080/00140139.2018.1547842 URL |
| [58] |
Lee, J. D., & See, K. A.(2004). Trust in automation: Designing for appropriate reliance. Human factors: The Journal of the Human Factors and Ergonomics Society, 46(1), 50-80.
doi: 10.1518/hfes.46.1.50.30392 URL |
| [59] |
Lee, J. G., Kim, K. J., Lee, S., & Shin, D. H.(2015). Can autonomous vehicles be safe and trustworthy? Effects of appearance and autonomy of unmanned driving systems. International Journal of Human-Computer Interaction, 31(10), 682-691.
doi: 10.1080/10447318.2015.1070547 URL |
| [60] |
Li, W. M., Yao, N. L., Shi, Y. W., Nie, W. R., Zhang, Y. H., Li, X. R., ... Gao, Z. F.(2020). Personality Openness Predicts Driver Trust in Automated Driving. Automotive Innovation, 3(1), 3-13.
doi: 10.1007/s42154-019-00086-w URL |
| [61] |
Manzey, D., Reichenbach, J., & Onnasch, L.(2012). Human performance consequences of automated decision aids: The impact of degree of automation and system experience. Journal of Cognitive Engineering and Decision Making, 6(1), 57-87.
doi: 10.1177/1555343411433844 URL |
| [62] |
Merritt, S. M., & Ilgen, D. R.(2008). Not all trust is created equal: Dispositional and history-based trust in human- automation interactions. Human Factors: The Journal of the Human Factors and Ergonomics Society, 50(2), 194-210.
doi: 10.1518/001872008X288574 URL |
| [63] |
Meyers, E.(2013). The neural decoding toolbox. Frontiers in Neuroinformatics, 7, 8.
doi: 10.3389/fninf.2013.00008 pmid: 23734125 |
| [64] | Mirnig, A. G., Wintersberger, P., Sutter, C., & Ziegler, J.(2016, October). A framework for analyzing and calibrating trust in automated vehicles. In Adjunct proceedings of the 8th international conference on automotive user interfaces and interactive vehicular applications (pp. 33-38). ACM. |
| [65] | Mishler, S.(2019). Whose drive is it anyway? Using multiple sequential drives to establish patterns of learned trust, error cost, and non-active trust repair while considering daytime and nighttime differences as a proxy for difficulty (Unpublished Master's thesis). Old Dominion University, Virginia. |
| [66] | Molnar, L. J.(2017). Age-related differences in driver behavior associated with automated vehicles and the transfer of control between automated and manual control: A simulator evaluation. University of Michigan, Ann Arbor, Transportation Research Institute. |
| [67] |
Molnar, L. J., Ryan, L. H., Pradhan, A. K., Eby, D. W., Louis, R. M. S., & Zakrajsek, J. S.(2018). Understanding trust and acceptance of automated vehicles: An exploratory simulator study of transfer of control between automated and manual driving. Transportation Research Part F: Traffic Psychology and Behaviour, 58, 319-328.
doi: 10.1016/j.trf.2018.06.004 URL |
| [68] | Morris, D. M., Erno, J. M., & Pilcher, J. J.(2017, September). Electrodermal response and automation trust during simulated self-driving car use. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 61, No. 1, pp. 1759-1762). Sage CA: Los Angeles, CA: SAGE Publications, |
| [69] | National Transportation Safety Board. (2018, March). Preliminary report: Crash and post-crash fire of electric- powered passenger vehicle. Retrieved December 25, 2020, from https://www.ntsb.gov/investigations/AccidentReports/Pages/HWY18FH011-preliminary.aspx |
| [70] | Niu, D. F., Terken, J., & Eggen, B.(2018). Anthropomorphizing information to enhance trust in autonomous vehicles. Human Factors and Ergonomics in Manufacturing & Service Industries, 28(6), 352-359. |
| [71] | Noah, B. E., & Walker, B. N.(2017, March). Trust Calibration through Reliability Displays in Automated Vehicles. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction (pp. 361-362). ACM. |
| [72] | Noah, B. E., Wintersberger, P., Mirnig, A. G., Thakkar, S., Yan, F., Gable, T. M., ... McCall, R.(2017, September). First workshop on trust in the age of automated driving. In Proceedings of the 9th international conference on automotive user interfaces and interactive vehicular applications adjunct (pp. 15-21). ACM. |
| [73] |
Payre, W., Cestac, J., & Delhomme, P.(2016). Fully automated driving: Impact of trust and practice on manual control recovery. Human Factors: The Journal of the Human Factors and Ergonomics Society, 58(2), 229-241.
doi: 10.1177/0018720815612319 URL |
| [74] | Petersen, L., Tilbury, D., Robert, L., & Yang, X. J.(2017, August) Effects of augmented situational awareness on driver trust in semi-autonomous vehicle operation. In 2017 NDIA ground vehicle systems engineering and technology symposium. Novi, MI. |
| [75] | Petersen, L., Zhao, H. J., Tilbury, D. M., Yang, X. J. & Robert, L. P.(2018, August). The influence of risk on driver's trust in autonomous driving system. In Proceedings of the 2018 ground vehicle systems engineering and technology symposium, Novi, MI. |
| [76] |
Rahwan, I., Cebrian, M., Obradovich, N., Bongard, J., Bonnefon, J.-F., Breazeal, C., ... Wellman, M.(2019). Machine behaviour. Nature, 568(7753), 477-486.
doi: 10.1038/s41586-019-1138-y URL |
| [77] |
Riding, R., & Cheema, I.(1991). Cognitive styles: An overview and integration. Educational Psychology, 11(3-4), 193-215.
doi: 10.1080/0144341910110101 URL |
| [78] | SAE, China. (2020). Technology roadmap for energy saving and new energy vehicles 2.0. China Machine Press. |
| [79] | SAE On-Road Automated Vehicle Standards Committee. (2018). Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE International. |
| [80] | Saffarian, M., de Winter, J. C., & Happee, R.(2012, September). Automated driving: Human-factors issues and design solutions. In Proceedings of the human factors and ergonomics society annual meeting (Vol. 56, No. 1, pp. 2296-2300). Sage CA: Los Angeles, CA: Sage Publications. |
| [81] | Schaefer, K. E., Billings, D. R., Szalma, J. L., Adams, J. K., Sanders, T. L., Chen, J. Y., & Hancock, P. A.(2014). A meta-analysis of factors influencing the development of trust in automation: Implications for human-robot interaction. Fort Belvoir, VA: Defense Technical Information Center. |
| [82] | Soh, H., Reid, L. N., & King, K. W.(2009). Measuring trust in advertising. Journal of Advertising, 38(2), 83-104. |
| [83] | Szalma, J. L., & Taylor, G. S.(2011). Individual differences in response to automation: The five factor model of personality. Journal of Experimental Psychology: Applied, 17(2), 71-96. |
| [84] | Toffetti, A., Wilschut, E. S., Martens, M. H., Schieben, A., Rambaldini, A., Merat, N., & Flemisch, F.(2009). CityMobil: Human factor issues regarding highly automated vehicles on eLane. Transportation Research Record: Journal of the Transportation Research Board, 2110(1), 1-8. |
| [85] | Verberne, F. M. F., Ham, J., & Midden, C. J. H.(2012). Trust in smart systems: Sharing driving goals and giving information to increase trustworthiness and acceptability of smart systems in cars. Human Factors: The Journal of the Human Factors and Ergonomics Society, 54(5), 799-810. |
| [86] | Verberne, F. M. F., Ham, J., & Midden, C. J. H.(2015). Trusting a virtual driver that looks, acts, and thinks like you. Human Factors: The Journal of the Human Factors and Ergonomics Society, 57(5), 895-909. |
| [87] | Walker, F., Verwey, W. V., & Martens, M.(2018, June). Gaze behaviour as a measure of trust in automated vehicles. In Proceedings of the 6th humanist conference, Hague, Netherlands. |
| [88] | Walker, G. H., & Stanton, N. A.(2017). Human factors in automotive engineering and technology. London: CRC Press. |
| [89] | Waytz, A., Heafner, J., & Epley, N.(2014). The mind in the machine: Anthropomorphism increases trust in an autonomous vehicle. Journal of Experimental Social Psychology, 52, 113-117. |
| [90] | Wintersberger, P., Noah, B. E., Kraus, J., McCall, R., Mirnig, A. G., Kunze, A., ... Walker, B. N.(2018, September). Second Workshop on Trust in the Age of Automated Driving. In Adjunct proceedings of the 10th international conference on automotive user interfaces and interactive vehicular applications (pp. 56-64). ACM. |
| [91] | Zhang, Q. N., Robert, L., Du, N., & Yang, X. J.(2018). Trust in AVs: The impact of expectations and individual differences. Presented at the Conference on Autonomous Vehicles in Society: Building a Research Agenda, Ann Arbor, MI. |
| [92] | Zihsler, J., Hock, P., Walch, M., Dzuba, K., Schwager, D., Szauer, P., & Rukzio, E.(2016, October). Carvatar: Increasing trust in highly-automated driving through social cues. In Adjunct proceedings of the 8th international conference on automotive user interfaces and interactive vehicular applications (pp. 9-14). ACM. |
| [1] | 黄晗静, 饶培伦. 老年用户与智能系统的多层次人机共融理论探索[J]. 心理科学进展, 2025, 33(2): 223-235. |
| [2] | 黄心语, 李晔. 人机信任校准的双途径:信任抑制与信任提升[J]. 心理科学进展, 2024, 32(3): 527-542. |
| [3] | 郑远霞, 刘国雄, 辛聪, 程黎. 以貌取人:儿童基于面孔的信任判断[J]. 心理科学进展, 2024, 32(2): 300-317. |
| [4] | 齐玥, 陈俊廷, 秦邵天, 杜峰. 通用人工智能时代的人与AI信任[J]. 心理科学进展, 2024, 32(12): 2124-2136. |
| [5] | 陆晓伟, 郭治斌, 程雨, 沈洁, 贵文君, 张林. 老年人面孔信任评价的积极效应及其发生机制[J]. 心理科学进展, 2023, 31(8): 1496-1503. |
| [6] | 朱宁奕, 江宁, 刘艳. 员工被上司信任感的形成机制[J]. 心理科学进展, 2022, 30(7): 1448-1462. |
| [7] | 齐玥, 秦邵天, 王可昕, 陈文锋. 面孔可信度评价调节:经验迁移假说的提出与验证[J]. 心理科学进展, 2022, 30(4): 715-722. |
| [8] | 曲佳晨, 贡喆. 信任水平存在性别差异吗?[J]. 心理科学进展, 2021, 29(12): 2236-2245. |
| [9] | 蒋倩妮, 庄想灵, 马国杰. 自动驾驶汽车与行人交互中的沟通界面设计:基于行人过街决策模型的评估[J]. 心理科学进展, 2021, 29(11): 1979-1992. |
| [10] | 徐禕, 刘艺璇. 技术信任和领导信任对企业员工新技术接受的影响[J]. 心理科学进展, 2021, 29(10): 1711-1723. |
| [11] | 贡喆, 唐玉洁, 刘昌. 信任博弈范式真的能测量信任吗?[J]. 心理科学进展, 2021, 29(1): 19-30. |
| [12] | 高青林, 周媛. 计算模型视角下信任形成的心理和神经机制——基于信任博弈中投资者的角度[J]. 心理科学进展, 2021, 29(1): 178-189. |
| [13] | 黄崇蓉, 胡瑜. 组织内信任与创造力的关系:元分析的证据[J]. 心理科学进展, 2020, 28(7): 1118-1132. |
| [14] | 颜爱民, 李亚丽, 谢菊兰, 李莹. 员工对企业社会责任的差异化反应:基于归因理论的阐释[J]. 心理科学进展, 2020, 28(6): 1004-1014. |
| [15] | 李庆功, 王震炎, 孙捷元, 师妍. 网约车场景中声誉和面孔可信度对女性信任判断的影响以及直觉性思维的调节作用[J]. 心理科学进展, 2020, 28(5): 746-751. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||