ISSN 0439-755X
CN 11-1911/B
主办:中国心理学会
中国科学院心理研究所
出版:科学出版社
CN 11-1911/B
主办:中国心理学会
中国科学院心理研究所
出版:科学出版社
心理学报 ›› 2025, Vol. 57 ›› Issue (6): 1013-1040.doi: 10.3724/SP.J.1041.2025.1013 cstr: 32110.14.2025.1013
简尽涵1,2, 张军恒1,2, 晏碧华1,2, 姬鸣1,2( )
)
收稿日期:2024-06-02
发布日期:2025-04-15
出版日期:2025-06-25
通讯作者:
姬鸣, E-mail: jiming@snnu.edu.cn基金资助:
JIAN Jinhan1,2, ZHANG Junheng1,2, YAN Bihua1,2, JI Ming1,2()
Received:2024-06-02
Online:2025-04-15
Published:2025-06-25
摘要: 空间语言交互受空间线索影响, 但多线索影响机制尚不明确。将环境线索、布局线索、社会空间线索编码为空间线索一致性作为核心变量, 将空间视角转换能力、场认知风格作为调节变量, 构建4个实验探究表述和接收过程在两种视角下的多线索影响机制。结果表明, 第一人称视角下, 空间参照系受空间线索的支持越多, 个体越倾向于使用它进行语言表述且交互效率更高, 且布局线索的支持效应大于环境线索; 场独立型表述者的参照系选择受空间线索一致性影响更大; 空间视角转换能力越高, 表述者越倾向于承担更多认知负荷, 接收者理解效率越高。第三人称视角会削弱空间线索支持效应和高空间视角转换能力者的交互优势, 提高使用自我中心参照系表述空间信息的概率, 还会使两类场认知风格表述者的表述过程产生不同程度的决策冲突。但无论何种视角下, 使用接收者参照系进行语言表述都是提高理解效率的最优方法。
中图分类号:
简尽涵, 张军恒, 晏碧华, 姬鸣. (2025). 空间语言交互在不同视角下的多线索影响机制. 心理学报, 57(6), 1013-1040.
JIAN Jinhan, ZHANG Junheng, YAN Bihua, JI Ming. (2025). The multi-cue influence mechanism of spatial communication across different perspectives. Acta Psychologica Sinica, 57(6), 1013-1040.
| 空间参照系 | 原点 | 坐标轴 | 举例 |
|---|---|---|---|
| 指示 | 表述者 | 肢体指向 | 表述者:“在我手指的那里” (伴随肢体指向动作) |
| 世界中心 | 地标 | 东西南北 | 宿舍在食堂东面 |
| 自我中心 | 表述者 | 视线朝向 | 在我右手边 |
| 他人中心 | 接收者 | 视线朝向 | 在你右前方 |
| 物体中心 | 物体 | 结构内在轴a | 注意汽车左前方的行人 |
| 阵列中心 | 阵列中心 | 布局内在轴 | 国旗队方阵最右侧的队员是排头 |
| 场景中心 | 场景中心 | 环境内在轴 | 老师站在教室前面的讲台上 |
表1 空间参照系类型
| 空间参照系 | 原点 | 坐标轴 | 举例 |
|---|---|---|---|
| 指示 | 表述者 | 肢体指向 | 表述者:“在我手指的那里” (伴随肢体指向动作) |
| 世界中心 | 地标 | 东西南北 | 宿舍在食堂东面 |
| 自我中心 | 表述者 | 视线朝向 | 在我右手边 |
| 他人中心 | 接收者 | 视线朝向 | 在你右前方 |
| 物体中心 | 物体 | 结构内在轴a | 注意汽车左前方的行人 |
| 阵列中心 | 阵列中心 | 布局内在轴 | 国旗队方阵最右侧的队员是排头 |
| 场景中心 | 场景中心 | 环境内在轴 | 老师站在教室前面的讲台上 |

图2 第一人称视角下4种空间线索一致性水平对应的信息表述任务场景

图1 第一人称视角下构建的空间语言交互场景

图3 物体阵列及其位置编号
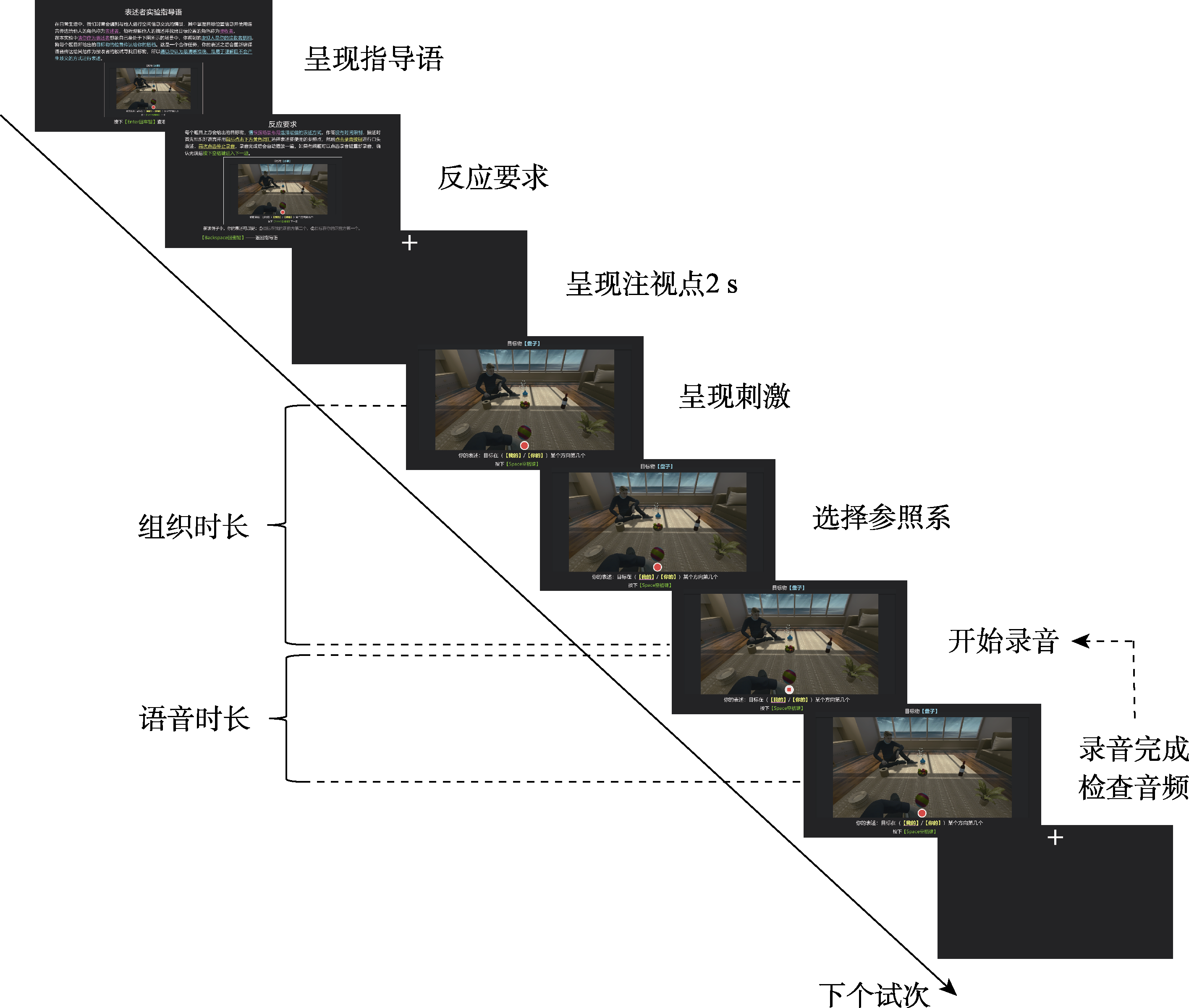
图4 实验1流程图
| 响应变量:参照系选择 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型a | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 66.10% | 6443.44 | 6454.03 | 3 | 1480 | 41.20 | <0.001 | 0.077 |
| 一致性水平 | 3 | 1480 | 41.20 | <0.001 | 0.077 | |||
| 2 | 66.00% | 6451.31 | 6461.90 | 4 | 1479 | 32.43 | <0.001 | 0.081 |
| 视角转换能力 | 1 | 1479 | 9.02 | 0.003 | 0.006 | |||
| 3 | 66.40% | 6468.42 | 6479.00 | 8 | 1475 | 17.27 | <0.001 | 0.086 |
| 一致性水平×场认知风格 | 4 | 1475 | 2.91 | 0.02 | 0.007 | |||
| 4b | 78.30% | 9520.63 | 9531.18 | 32 | 1451 | 8.98 | <0.001 | 0.165 |
| 一致性水平×目标物体 | 24 | 1451 | 10.36 | <0.001 | 0.143 | |||
表2 第一人称视角下参照系选择的逐步回归模型摘要(N = 53 × 28 = 1484)
| 响应变量:参照系选择 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型a | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 66.10% | 6443.44 | 6454.03 | 3 | 1480 | 41.20 | <0.001 | 0.077 |
| 一致性水平 | 3 | 1480 | 41.20 | <0.001 | 0.077 | |||
| 2 | 66.00% | 6451.31 | 6461.90 | 4 | 1479 | 32.43 | <0.001 | 0.081 |
| 视角转换能力 | 1 | 1479 | 9.02 | 0.003 | 0.006 | |||
| 3 | 66.40% | 6468.42 | 6479.00 | 8 | 1475 | 17.27 | <0.001 | 0.086 |
| 一致性水平×场认知风格 | 4 | 1475 | 2.91 | 0.02 | 0.007 | |||
| 4b | 78.30% | 9520.63 | 9531.18 | 32 | 1451 | 8.98 | <0.001 | 0.165 |
| 一致性水平×目标物体 | 24 | 1451 | 10.36 | <0.001 | 0.143 | |||
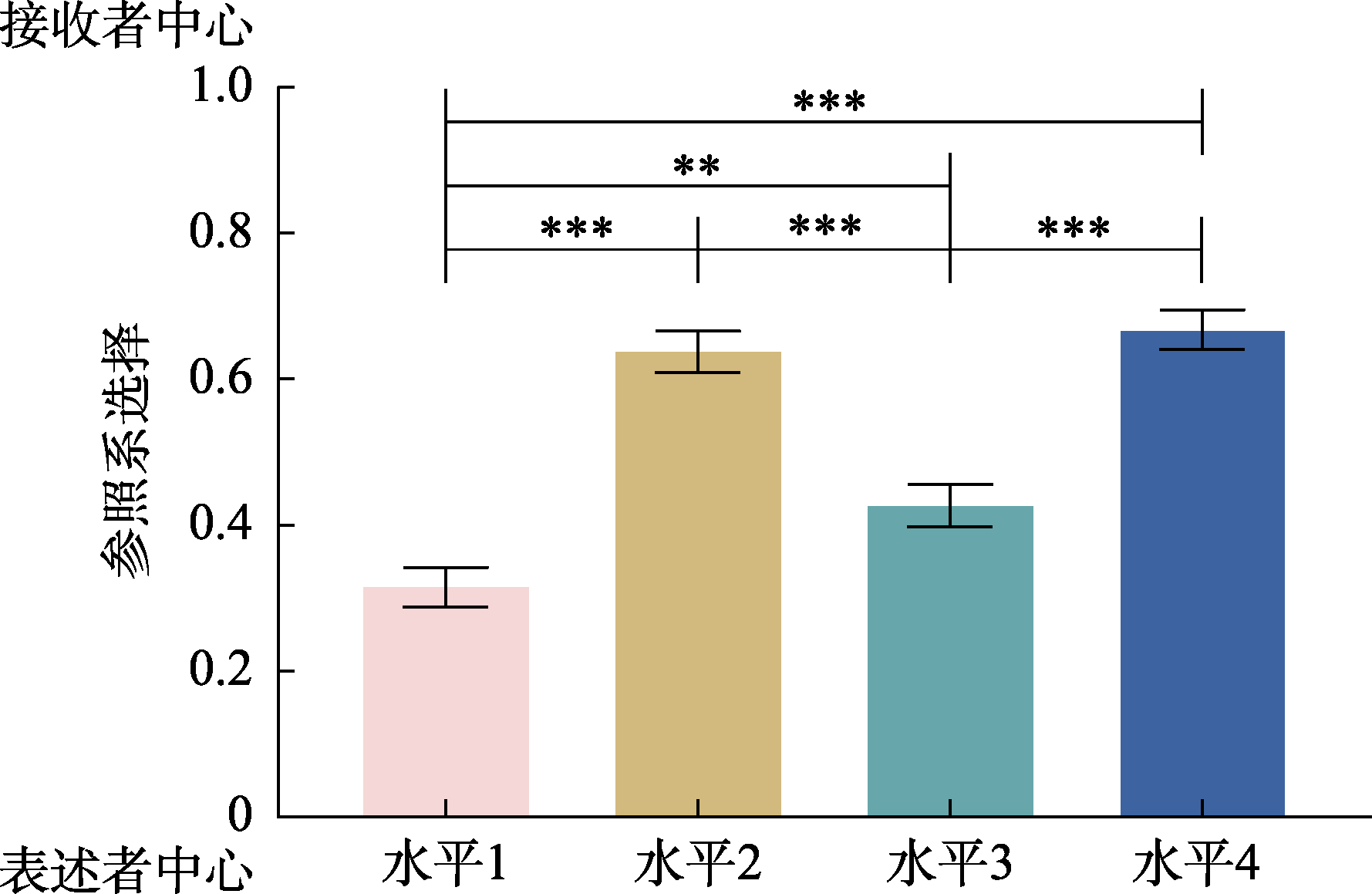
图5 第一人称视角不同一致性水平下的参照系选择(M ± SE, 误差线为标准误, *p < 0.05, **p < 0.01, ***p < 0.001, 下同)
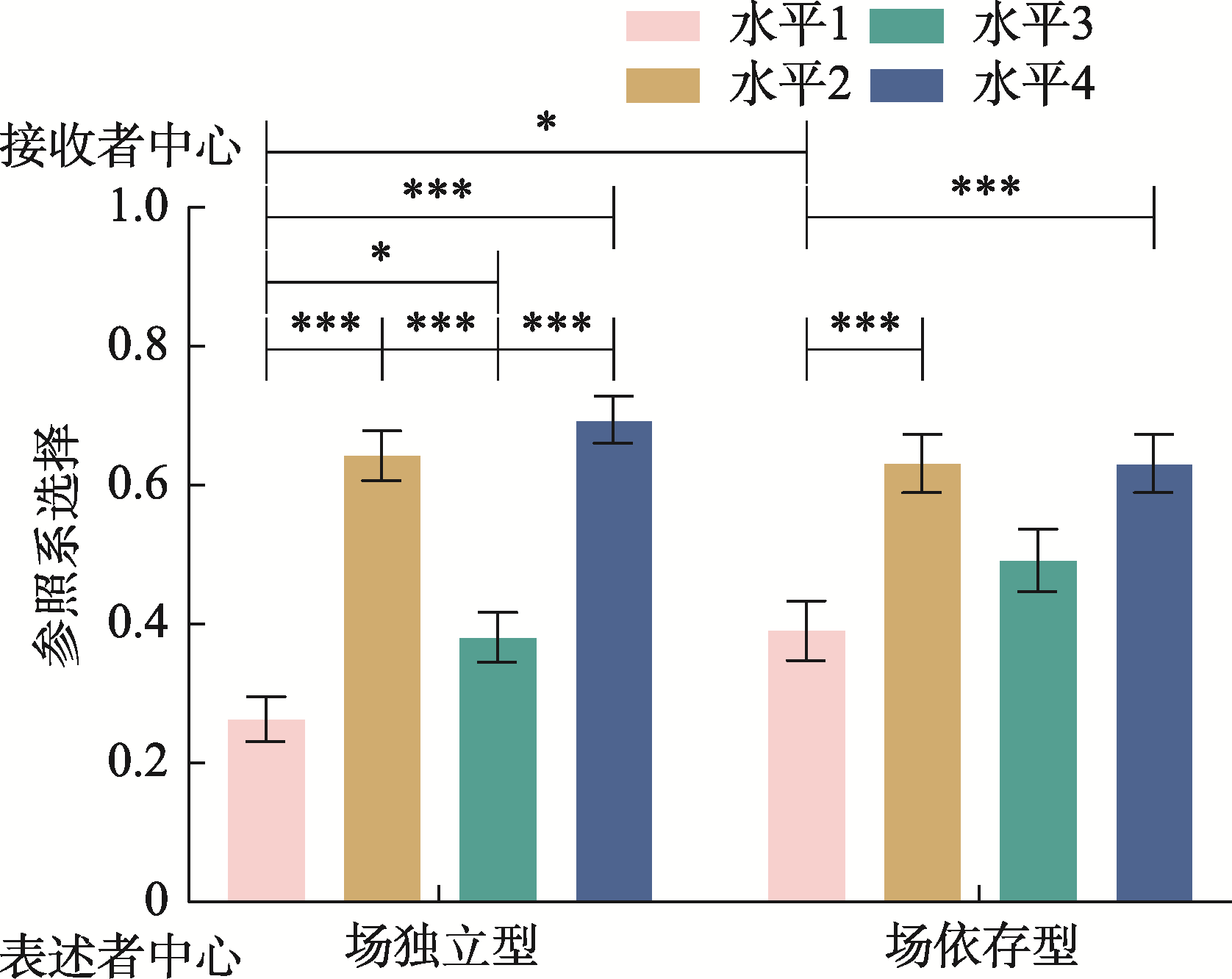
图6 第一人称视角下两种场认知风格被试在不同一致性水平的参照系选择
| 响应变量:组织时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布a | 2790.13 | 2800.72 | 3 | 1480 | 4.44 | 0.004 | 0.009 |
| 一致性水平 | 3 | 1480 | 4.44 | 0.004 | 0.009 | |||
| 2 | 伽马分布 | 2348.99 | 2359.57 | 9 | 1474 | 28.56 | <0.001 | 0.148 |
| 目标物体 | 6 | 1474 | 33.08 | <0.001 | 0.115 | |||
| 3 | 伽马分布 | 2372.56 | 2383.12 | 27 | 1456 | 16.36 | <0.001 | 0.233 |
| 一致性水平×目标物体 | 18 | 1456 | 2.01 | 0.007 | 0.019 | |||
| 4b | 正态分布 | 28726.94 | 28737.52 | 9 | 1474 | 16.27 | <0.001 | 0.090 |
表3 第一人称视角下组织时长逐步回归模型摘要(N = 53 × 28 = 1484)
| 响应变量:组织时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布a | 2790.13 | 2800.72 | 3 | 1480 | 4.44 | 0.004 | 0.009 |
| 一致性水平 | 3 | 1480 | 4.44 | 0.004 | 0.009 | |||
| 2 | 伽马分布 | 2348.99 | 2359.57 | 9 | 1474 | 28.56 | <0.001 | 0.148 |
| 目标物体 | 6 | 1474 | 33.08 | <0.001 | 0.115 | |||
| 3 | 伽马分布 | 2372.56 | 2383.12 | 27 | 1456 | 16.36 | <0.001 | 0.233 |
| 一致性水平×目标物体 | 18 | 1456 | 2.01 | 0.007 | 0.019 | |||
| 4b | 正态分布 | 28726.94 | 28737.52 | 9 | 1474 | 16.27 | <0.001 | 0.090 |
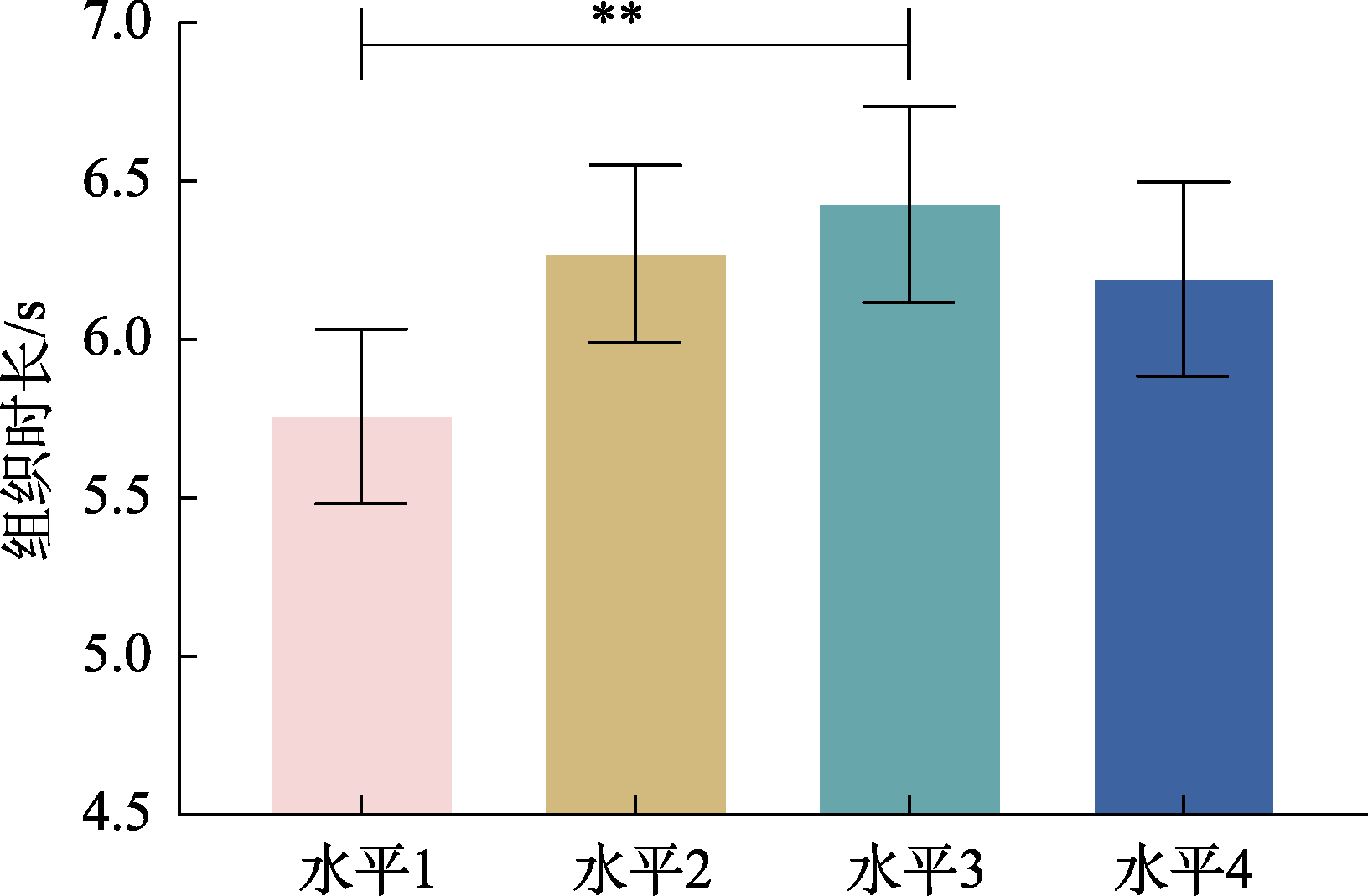
图7 第一人称视角不同一致性水平下的组织时长
| 响应变量:语音时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | −1121.07 | −1110.48 | 6 | 1477 | 5.31 | <0.001 | 0.021 |
| 目标物体 | 6 | 1477 | 5.31 | <0.001 | 0.021 | |||
| 2 | 伽马分布 | −1027.77 | −1017.21 | 27 | 1456 | 3.73 | <0.001 | 0.065 |
| 一致性水平×目标物体 | 21 | 1456 | 1.97 | 0.005 | 0.027 | |||
| 3 | 正态分布 | 22932.40 | 22942.96 | 27 | 1456 | 3.42 | <0.001 | 0.060 |
表4 第一人称视角下语音时长逐步回归模型摘要(N = 53 × 28 = 1484)
| 响应变量:语音时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | −1121.07 | −1110.48 | 6 | 1477 | 5.31 | <0.001 | 0.021 |
| 目标物体 | 6 | 1477 | 5.31 | <0.001 | 0.021 | |||
| 2 | 伽马分布 | −1027.77 | −1017.21 | 27 | 1456 | 3.73 | <0.001 | 0.065 |
| 一致性水平×目标物体 | 21 | 1456 | 1.97 | 0.005 | 0.027 | |||
| 3 | 正态分布 | 22932.40 | 22942.96 | 27 | 1456 | 3.42 | <0.001 | 0.060 |
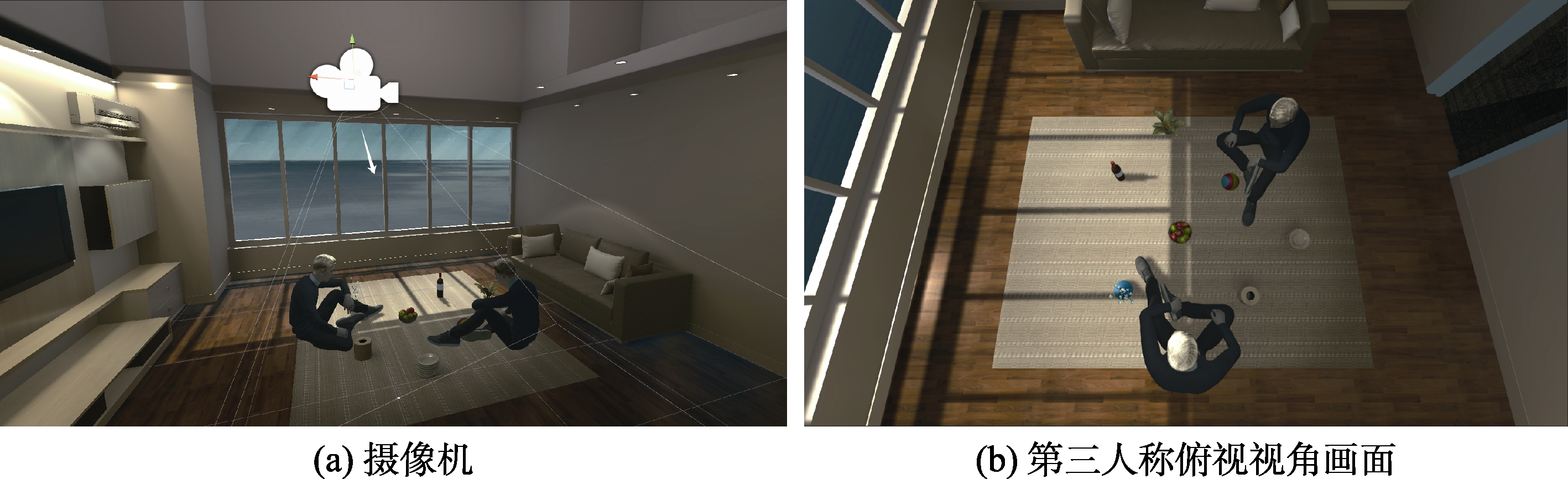
图8 第三人称俯视视角下通过构建虚拟场景来制作实验材料

图9 第三人称俯视视角下4种空间线索一致性水平对应的信息表述任务场景
| 响应变量:参照系选择 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 66.30% | 5420.65 | 5430.91 | 3 | 1256 | 15.43 | < 0.001 | 0.036 |
| 一致性水平 | 3 | 1256 | 15.43 | < 0.001 | 0.036 | |||
| 2 | 76.70% | 6421.39 | 6431.62 | 27 | 1232 | 8.29 | < 0.001 | 0.154 |
| 一致性水平×目标物体 | 24 | 1232 | 8.80 | < 0.001 | 0.145 | |||
表5 第三人称俯视视角下参照系选择的逐步回归模型摘要(N = 45 × 28 = 1260)
| 响应变量:参照系选择 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 66.30% | 5420.65 | 5430.91 | 3 | 1256 | 15.43 | < 0.001 | 0.036 |
| 一致性水平 | 3 | 1256 | 15.43 | < 0.001 | 0.036 | |||
| 2 | 76.70% | 6421.39 | 6431.62 | 27 | 1232 | 8.29 | < 0.001 | 0.154 |
| 一致性水平×目标物体 | 24 | 1232 | 8.80 | < 0.001 | 0.145 | |||
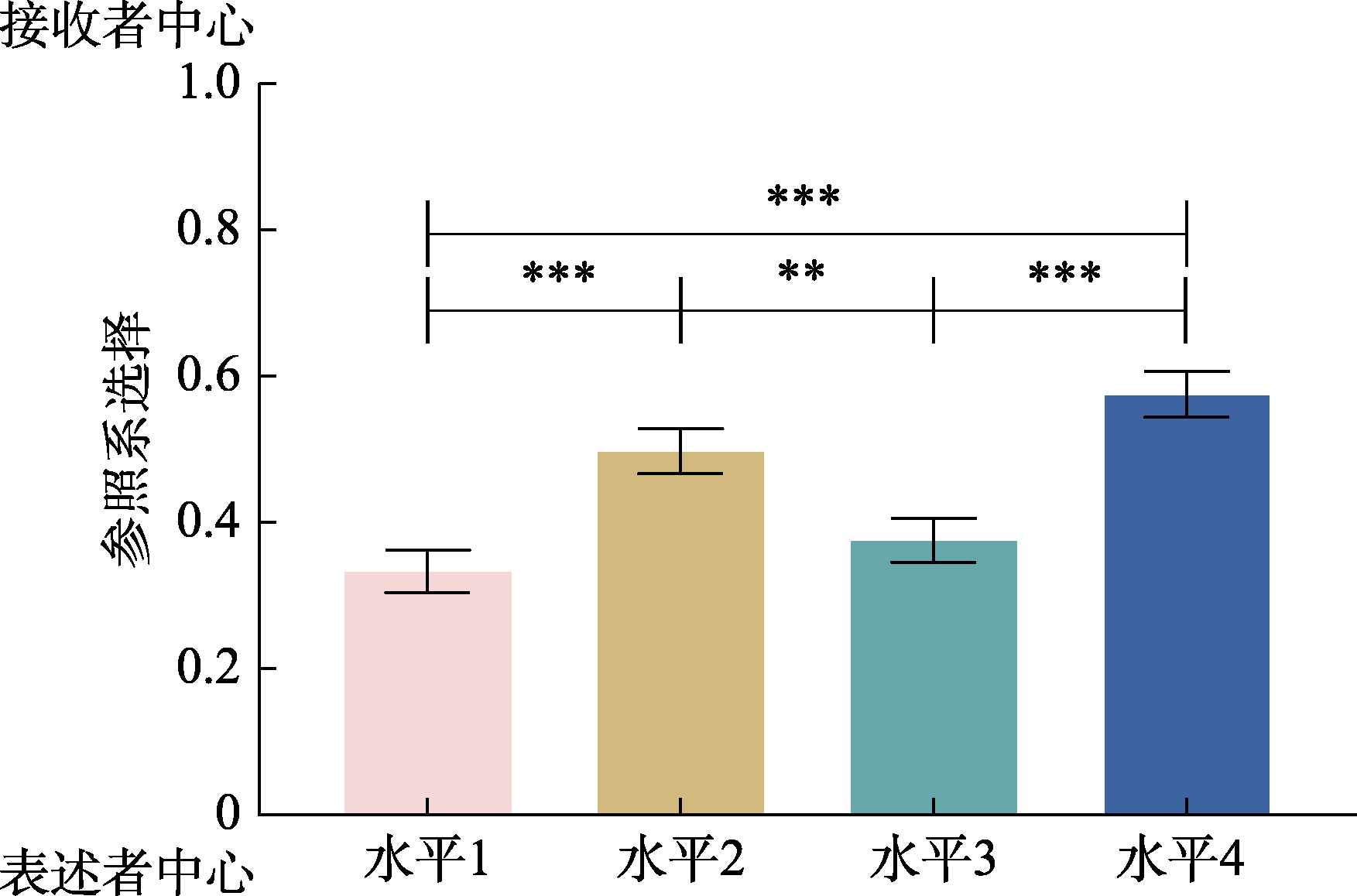
图10 第三人称俯视视角不同一致性水平下的参照系选择
| 响应变量:组织时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 伽马分布 | 2225.36 | 2235.61 | 6 | 1253 | 31.23 | <0.001 | 0.130 |
| 目标物体 | 6 | 1253 | 31.23 | <0.001 | 0.130 | |||
| 2 | 伽马分布 | 2202.67 | 2212.90 | 27 | 1232 | 43.90 | <0.001 | 0.490 |
| 一致性水平×目标物体 | 18 | 1232 | 3.19 | <0.001 | 0.024 | |||
| 3 | 正态分布 | 25074.37 | 25084.59 | 27 | 1232 | 14.12 | <0.001 | 0.236 |
表6 第三人称俯视视角下组织时长的逐步回归模型摘要(N = 45 × 28 = 1260)
| 响应变量:组织时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 伽马分布 | 2225.36 | 2235.61 | 6 | 1253 | 31.23 | <0.001 | 0.130 |
| 目标物体 | 6 | 1253 | 31.23 | <0.001 | 0.130 | |||
| 2 | 伽马分布 | 2202.67 | 2212.90 | 27 | 1232 | 43.90 | <0.001 | 0.490 |
| 一致性水平×目标物体 | 18 | 1232 | 3.19 | <0.001 | 0.024 | |||
| 3 | 正态分布 | 25074.37 | 25084.59 | 27 | 1232 | 14.12 | <0.001 | 0.236 |
| 响应变量:语音时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 伽马分布 | −875.68 | −865.42 | 6 | 1253 | 4.91 | <0.001 | 0.023 |
| 目标物体 | 6 | 1253 | 4.91 | <0.001 | 0.023 | |||
| 2 | 伽马分布 | −785.86 | −775.64 | 27 | 1232 | 8.61 | <0.001 | 0.159 |
| 一致性水平×目标物体 | 21 | 1232 | 2.41 | <0.001 | 0.035 | |||
| 3 | 正态分布 | 19518.22 | 19528.45 | 27 | 1232 | 8.73 | <0.001 | 0.161 |
表7 第三人称俯视视角下语音时长的逐步回归模型摘要(N = 45 × 28 = 1260)
| 响应变量:语音时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 伽马分布 | −875.68 | −865.42 | 6 | 1253 | 4.91 | <0.001 | 0.023 |
| 目标物体 | 6 | 1253 | 4.91 | <0.001 | 0.023 | |||
| 2 | 伽马分布 | −785.86 | −775.64 | 27 | 1232 | 8.61 | <0.001 | 0.159 |
| 一致性水平×目标物体 | 21 | 1232 | 2.41 | <0.001 | 0.035 | |||
| 3 | 正态分布 | 19518.22 | 19528.45 | 27 | 1232 | 8.73 | <0.001 | 0.161 |
| 响应变量:参照系选择 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 64.00% | 11842.45 | 11854.28 | 3 | 2740 | 54.06 | <0.001 | 0.056 |
| 一致性水平 | 3 | 2740 | 54.06 | <0.001 | 0.056 | |||
| 2 | 64.10% | 11849.56 | 11861.39 | 4 | 2739 | 41.68 | <0.001 | 0.057 |
| 视角转换能力 | 1 | 2739 | 5.92 | 0.015 | 0.002 | |||
| 3 | 64.40% | 11856.19 | 11868.01 | 5 | 2738 | 34.26 | <0.001 | 0.059 |
| 观察视角 | 1 | 2738 | 5.92 | 0.015 | 0.002 | |||
| 4 | 64.70% | 11867.17 | 11879.00 | 8 | 2735 | 22.44 | <0.001 | 0.062 |
| 一致性水平×观察视角 | 3 | 2735 | 3.10 | 0.026 | 0.003 | |||
| 5 | 77.00% | 14280.18 | 14291.99 | 32 | 2711 | 15.85 | <0.001 | 0.158 |
| 一致性水平×目标物体 | 24 | 2711 | 18.85 | <0.001 | 0.141 | |||
表8 参照系选择的逐步回归模型摘要(N = 98 × 28 = 2744)
| 响应变量:参照系选择 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 64.00% | 11842.45 | 11854.28 | 3 | 2740 | 54.06 | <0.001 | 0.056 |
| 一致性水平 | 3 | 2740 | 54.06 | <0.001 | 0.056 | |||
| 2 | 64.10% | 11849.56 | 11861.39 | 4 | 2739 | 41.68 | <0.001 | 0.057 |
| 视角转换能力 | 1 | 2739 | 5.92 | 0.015 | 0.002 | |||
| 3 | 64.40% | 11856.19 | 11868.01 | 5 | 2738 | 34.26 | <0.001 | 0.059 |
| 观察视角 | 1 | 2738 | 5.92 | 0.015 | 0.002 | |||
| 4 | 64.70% | 11867.17 | 11879.00 | 8 | 2735 | 22.44 | <0.001 | 0.062 |
| 一致性水平×观察视角 | 3 | 2735 | 3.10 | 0.026 | 0.003 | |||
| 5 | 77.00% | 14280.18 | 14291.99 | 32 | 2711 | 15.85 | <0.001 | 0.158 |
| 一致性水平×目标物体 | 24 | 2711 | 18.85 | <0.001 | 0.141 | |||
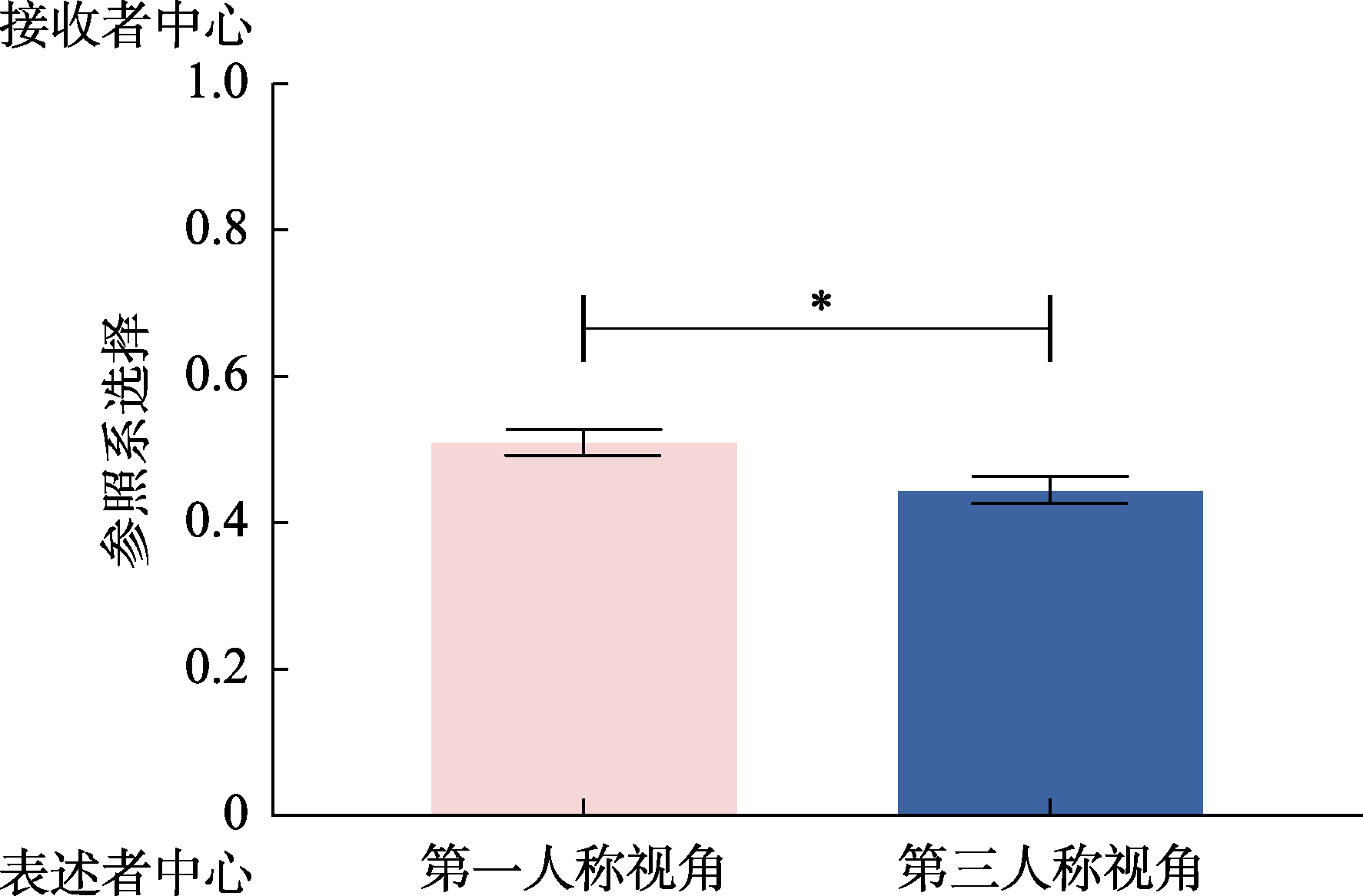
图11 不同观察视角下的参照系选择
| 响应变量:组织时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 5357.19 | 5369.01 | 7 | 2736 | 2.85 | 0.006 | 0.007 |
| 一致性水平×观察视角 | 7 | 2736 | 2.85 | 0.006 | 0.007 | |||
| 2 | 伽马分布 | 4568.08 | 4579.90 | 13 | 2730 | 32.20 | <0.001 | 0.133 |
| 目标物体 | 6 | 2730 | 54.40 | <0.001 | 0.104 | |||
| 3 | 正态分布 | 54423.51 | 54435.33 | 13 | 2730 | 17.23 | <0.001 | 0.076 |
表9 组织时长的逐步回归模型摘要(N = 98 × 28 = 2744)
| 响应变量:组织时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 5357.19 | 5369.01 | 7 | 2736 | 2.85 | 0.006 | 0.007 |
| 一致性水平×观察视角 | 7 | 2736 | 2.85 | 0.006 | 0.007 | |||
| 2 | 伽马分布 | 4568.08 | 4579.90 | 13 | 2730 | 32.20 | <0.001 | 0.133 |
| 目标物体 | 6 | 2730 | 54.40 | <0.001 | 0.104 | |||
| 3 | 正态分布 | 54423.51 | 54435.33 | 13 | 2730 | 17.23 | <0.001 | 0.076 |
| 响应变量:语音时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 伽马分布 | −1974.30 | −1962.48 | 4 | 2739 | 2.47 | 0.043 | 0.004 |
| 一致性水平×视角转换能力 | 4 | 2739 | 2.47 | 0.043 | 0.004 | |||
| 2 | 伽马分布 | −2013.33 | −2001.51 | 10 | 2733 | 5.30 | <0.001 | 0.019 |
| 目标物体 | 6 | 2733 | 7.51 | <0.001 | 0.016 | |||
| 3 | 正态分布 | 42981.78 | 42993.60 | 10 | 2733 | 4.80 | <0.001 | 0.017 |
表10 语音时长的逐步回归模型摘要(N = 98 × 28 = 2744)
| 响应变量:语音时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R2 |
| 1 | 伽马分布 | −1974.30 | −1962.48 | 4 | 2739 | 2.47 | 0.043 | 0.004 |
| 一致性水平×视角转换能力 | 4 | 2739 | 2.47 | 0.043 | 0.004 | |||
| 2 | 伽马分布 | −2013.33 | −2001.51 | 10 | 2733 | 5.30 | <0.001 | 0.019 |
| 目标物体 | 6 | 2733 | 7.51 | <0.001 | 0.016 | |||
| 3 | 正态分布 | 42981.78 | 42993.60 | 10 | 2733 | 4.80 | <0.001 | 0.017 |

图12 第一人称视角下4种空间线索一致性水平对应的信息接收任务场景
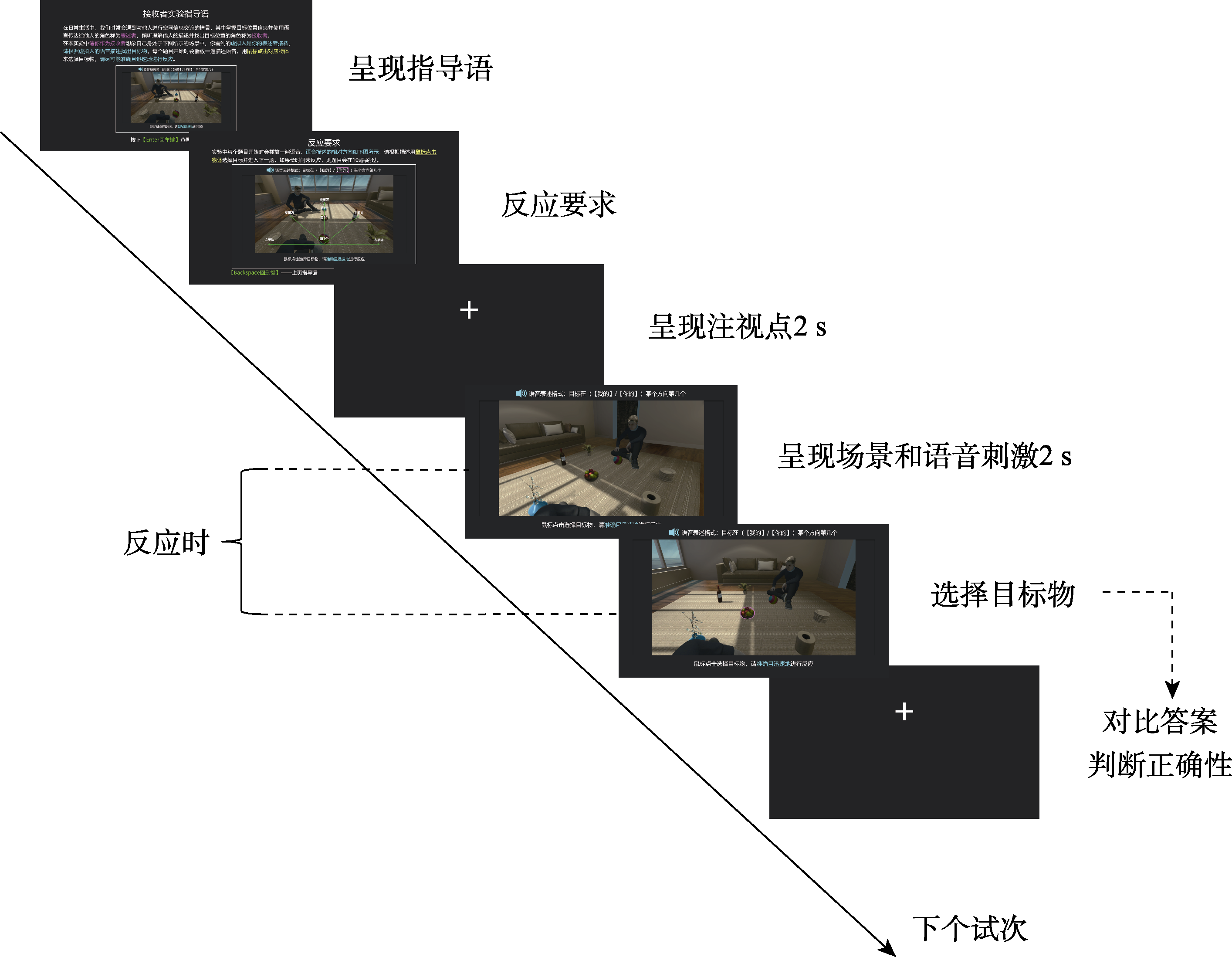
图13 实验3流程图
| 响应变量:理解正确性 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 84.20% | 15984.50 | 15996.59 | 7 | 3128 | 27.01 | <0.001 | 0.057 |
| 一致性水平×语句参照系 | 7 | 3128 | 27.01 | <0.001 | 0.057 | |||
| 2 | 90.30% | 19743.10 | 19755.19 | 13 | 3122 | 28.22 | <0.001 | 0.105 |
| 目标物体 | 6 | 3122 | 43.34 | <0.001 | 0.075 | |||
表11 第一人称视角下接收者理解正确性的逐步回归模型摘要(N = 56 × 56 = 3136)
| 响应变量:理解正确性 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 84.20% | 15984.50 | 15996.59 | 7 | 3128 | 27.01 | <0.001 | 0.057 |
| 一致性水平×语句参照系 | 7 | 3128 | 27.01 | <0.001 | 0.057 | |||
| 2 | 90.30% | 19743.10 | 19755.19 | 13 | 3122 | 28.22 | <0.001 | 0.105 |
| 目标物体 | 6 | 3122 | 43.34 | <0.001 | 0.075 | |||
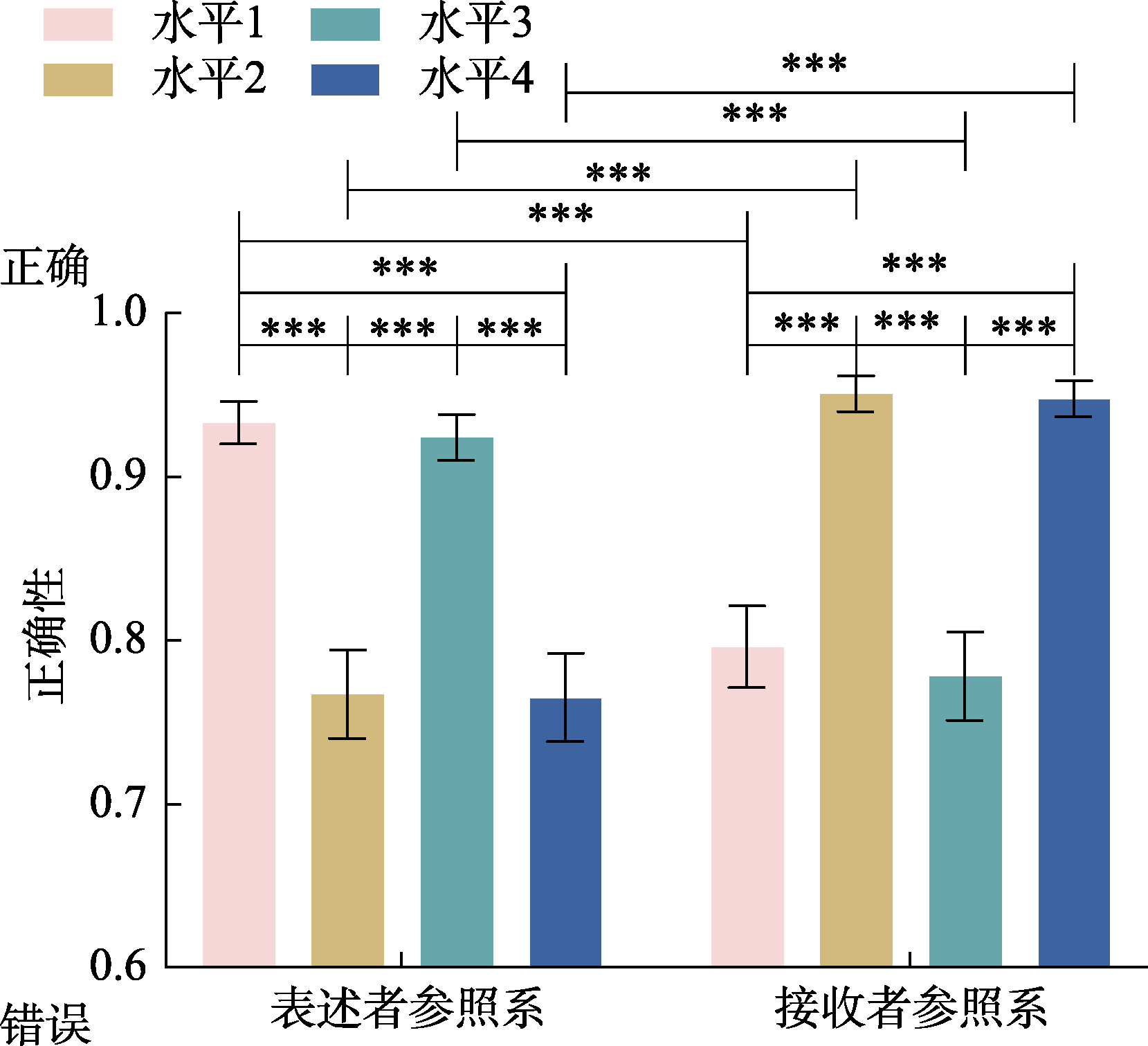
图14 第一人称视角不同空间线索一致性水平下对两种参照系表述语句的理解正确性
| 响应变量:理解时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 2372.99 | 2385.09 | 1 | 3134 | 59.52 | <0.001 | 0.019 |
| 语句参照系 | 1 | 3134 | 59.52 | <0.001 | 0.019 | |||
| 2 | 伽马分布 | 2374.34 | 2386.44 | 2 | 3133 | 33.19 | <0.001 | 0.021 |
| 视角转换能力 | 1 | 3133 | 6.99 | 0.008 | 0.002 | |||
| 3 | 伽马分布 | 2278.08 | 2290.17 | 8 | 3127 | 22.73 | <0.001 | 0.055 |
| 一致性水平×语句参照系 | 6 | 3127 | 15.17 | <0.001 | 0.028 | |||
| 4 | 伽马分布 | 1731.40 | 1743.48 | 14 | 3121 | 32.33 | <0.001 | 0.127 |
| 目标物体 | 6 | 3121 | 62.00 | <0.001 | 0.104 | |||
| 5 | 伽马分布 | 1756.06 | 1768.13 | 32 | 3103 | 27.15 | <0.001 | 0.219 |
| 一致性水平×目标物体 | 18 | 3103 | 4.70 | <0.001 | 0.021 | |||
| 6a | 正态分布 | 52831.08 | 52843.17 | 14 | 3121 | 25.00 | <0.001 | 0.101 |
表12 第一人称视角下理解时长的逐步回归模型摘要(N = 56 × 56 = 3136)
| 响应变量:理解时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 2372.99 | 2385.09 | 1 | 3134 | 59.52 | <0.001 | 0.019 |
| 语句参照系 | 1 | 3134 | 59.52 | <0.001 | 0.019 | |||
| 2 | 伽马分布 | 2374.34 | 2386.44 | 2 | 3133 | 33.19 | <0.001 | 0.021 |
| 视角转换能力 | 1 | 3133 | 6.99 | 0.008 | 0.002 | |||
| 3 | 伽马分布 | 2278.08 | 2290.17 | 8 | 3127 | 22.73 | <0.001 | 0.055 |
| 一致性水平×语句参照系 | 6 | 3127 | 15.17 | <0.001 | 0.028 | |||
| 4 | 伽马分布 | 1731.40 | 1743.48 | 14 | 3121 | 32.33 | <0.001 | 0.127 |
| 目标物体 | 6 | 3121 | 62.00 | <0.001 | 0.104 | |||
| 5 | 伽马分布 | 1756.06 | 1768.13 | 32 | 3103 | 27.15 | <0.001 | 0.219 |
| 一致性水平×目标物体 | 18 | 3103 | 4.70 | <0.001 | 0.021 | |||
| 6a | 正态分布 | 52831.08 | 52843.17 | 14 | 3121 | 25.00 | <0.001 | 0.101 |
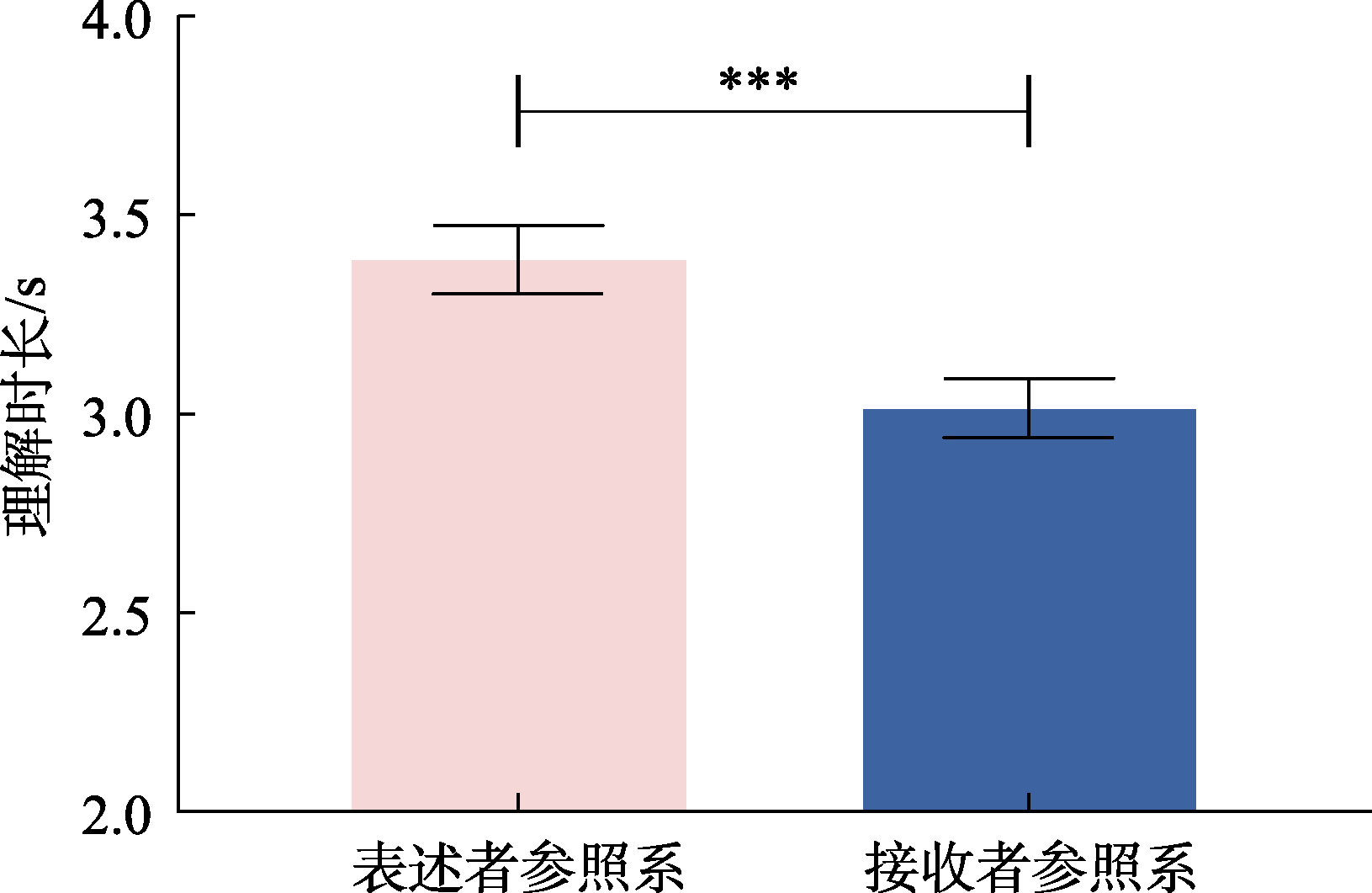
图15 第一人称视角下对不同表述参照系语句的理解时长
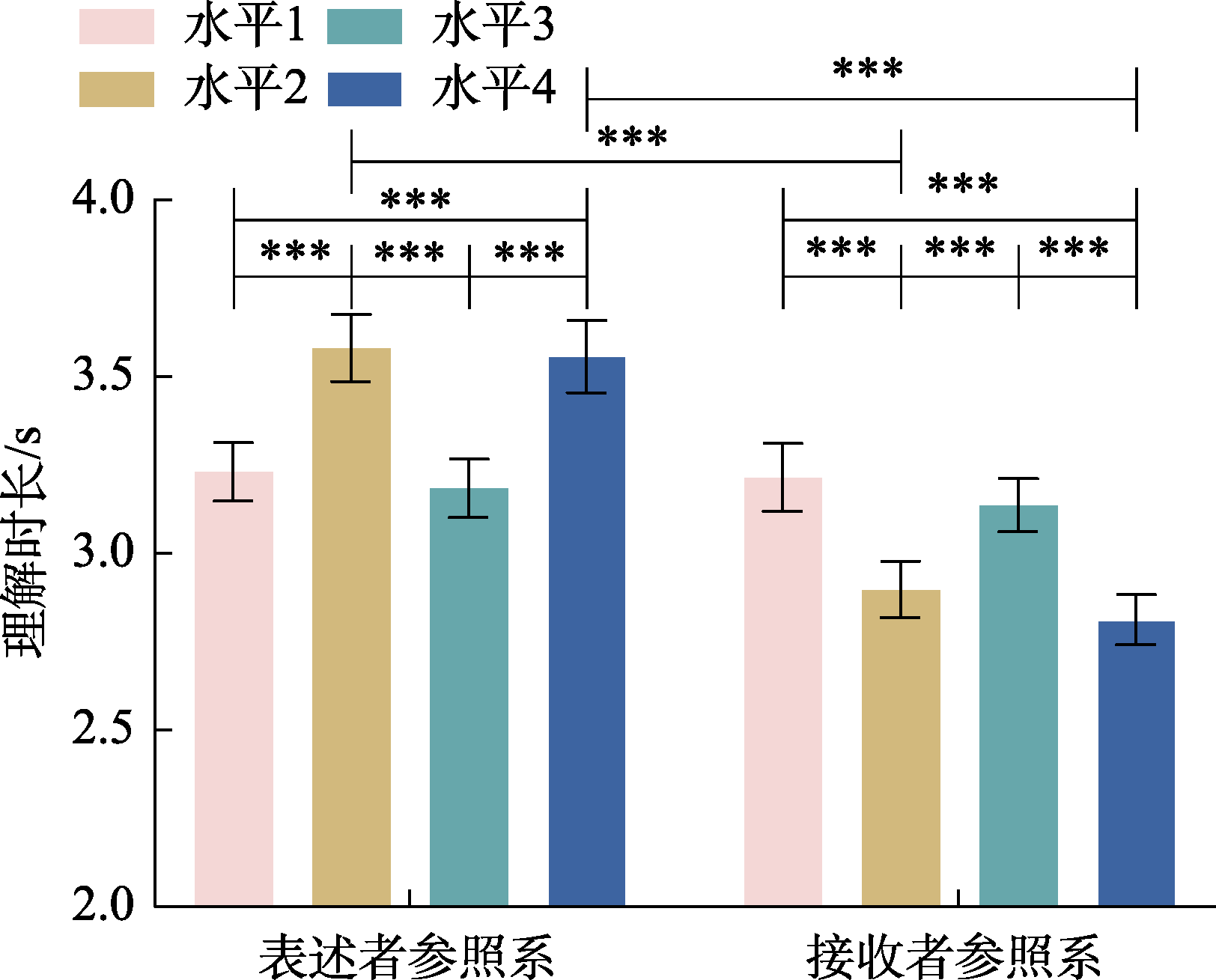
图16 第一人称视角不同空间线索一致性水平下对两种参照系表述语句的理解时长
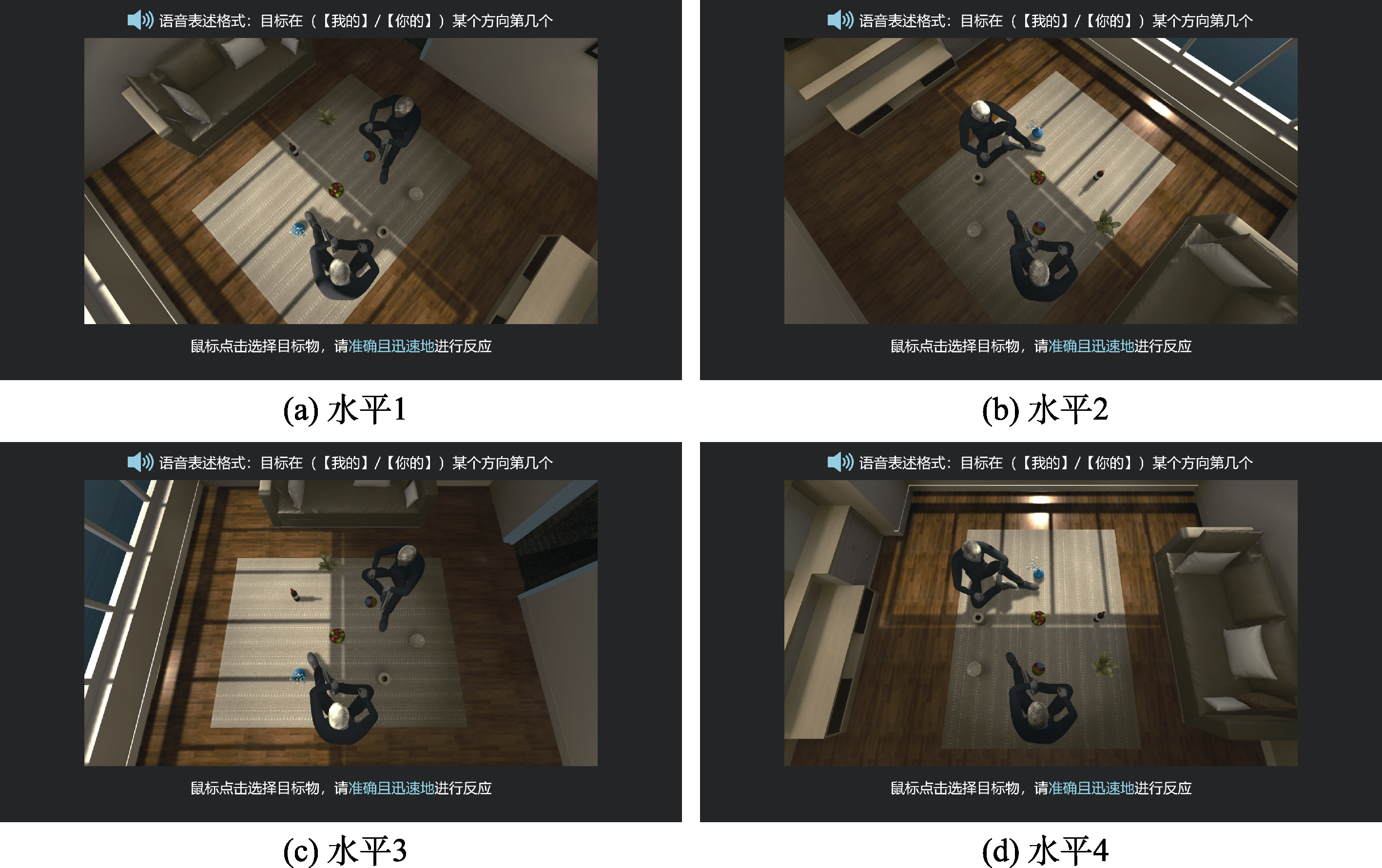
图17 第三人称俯视视角下4种空间线索一致性水平对应的信息接收任务场景
| 响应变量:理解正确性 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 82.40% | 12447.77 | 12459.38 | 7 | 2456 | 10.38 | <0.001 | 0.029 |
| 一致性水平×语句参照系 | 7 | 2456 | 10.38 | <0.001 | 0.029 | |||
| 2 | 87.50% | 14904.66 | 14916.26 | 13 | 2450 | 19.17 | <0.001 | 0.092 |
| 目标物体 | 6 | 2450 | 35.21 | <0.001 | 0.078 | |||
表13 第三人称俯视视角下理解正确性的逐步回归模型摘要(N = 44 × 56 = 2464)
| 响应变量:理解正确性 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 82.40% | 12447.77 | 12459.38 | 7 | 2456 | 10.38 | <0.001 | 0.029 |
| 一致性水平×语句参照系 | 7 | 2456 | 10.38 | <0.001 | 0.029 | |||
| 2 | 87.50% | 14904.66 | 14916.26 | 13 | 2450 | 19.17 | <0.001 | 0.092 |
| 目标物体 | 6 | 2450 | 35.21 | <0.001 | 0.078 | |||
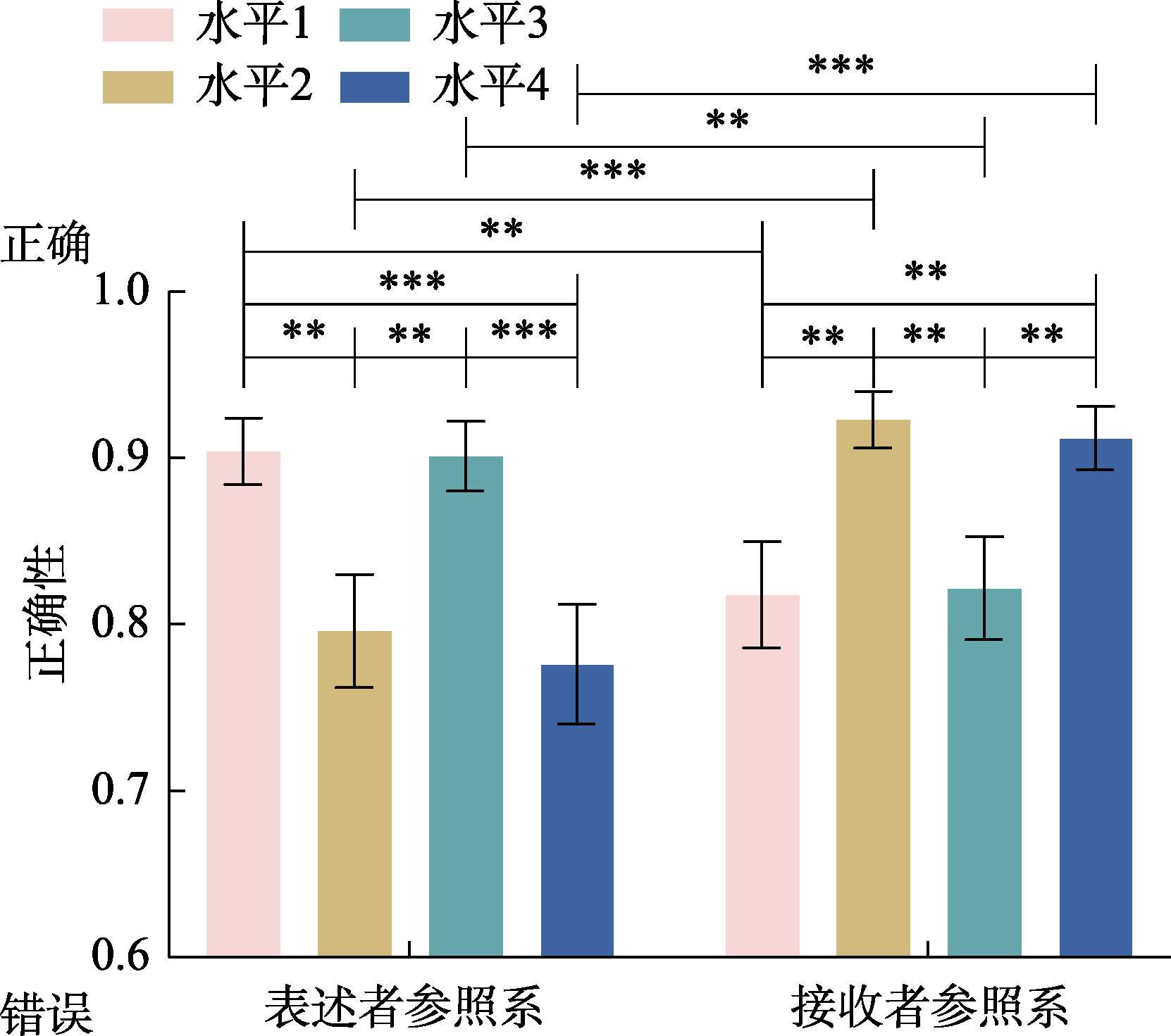
图18 第三人称俯视视角不同空间线索一致性水平下对两种参照系表述语句的理解正确性
| 响应变量:理解时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 1357.95 | 1369.56 | 1 | 2462 | 77.73 | <0.001 | 0.031 |
| 语句参照系 | 1 | 2462 | 77.73 | <0.001 | 0.031 | |||
| 2 | 伽马分布 | 1315.50 | 1327.11 | 7 | 2456 | 15.97 | <0.001 | 0.044 |
| 一致性水平×语句参照系 | 6 | 2456 | 8.98 | <0.001 | 0.021 | |||
| 3 | 伽马分布 | 802.60 | 814.21 | 13 | 2450 | 20.43 | <0.001 | 0.098 |
| 目标物体 | 6 | 2450 | 35.60 | <0.001 | 0.079 | |||
| 4 | 伽马分布 | 832.06 | 843.65 | 31 | 2432 | 21.99 | <0.001 | 0.219 |
| 一致性水平×目标物体 | 18 | 2432 | 5.61 | <0.001 | 0.032 | |||
| 5a | 正态分布 | 40639.02 | 40650.62 | 13 | 2450 | 13.71 | <0.001 | 0.068 |
表14 第三人称俯视视角下理解时长的逐步回归模型摘要(N = 44 × 56 = 2464)
| 响应变量:理解时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 1357.95 | 1369.56 | 1 | 2462 | 77.73 | <0.001 | 0.031 |
| 语句参照系 | 1 | 2462 | 77.73 | <0.001 | 0.031 | |||
| 2 | 伽马分布 | 1315.50 | 1327.11 | 7 | 2456 | 15.97 | <0.001 | 0.044 |
| 一致性水平×语句参照系 | 6 | 2456 | 8.98 | <0.001 | 0.021 | |||
| 3 | 伽马分布 | 802.60 | 814.21 | 13 | 2450 | 20.43 | <0.001 | 0.098 |
| 目标物体 | 6 | 2450 | 35.60 | <0.001 | 0.079 | |||
| 4 | 伽马分布 | 832.06 | 843.65 | 31 | 2432 | 21.99 | <0.001 | 0.219 |
| 一致性水平×目标物体 | 18 | 2432 | 5.61 | <0.001 | 0.032 | |||
| 5a | 正态分布 | 40639.02 | 40650.62 | 13 | 2450 | 13.71 | <0.001 | 0.068 |
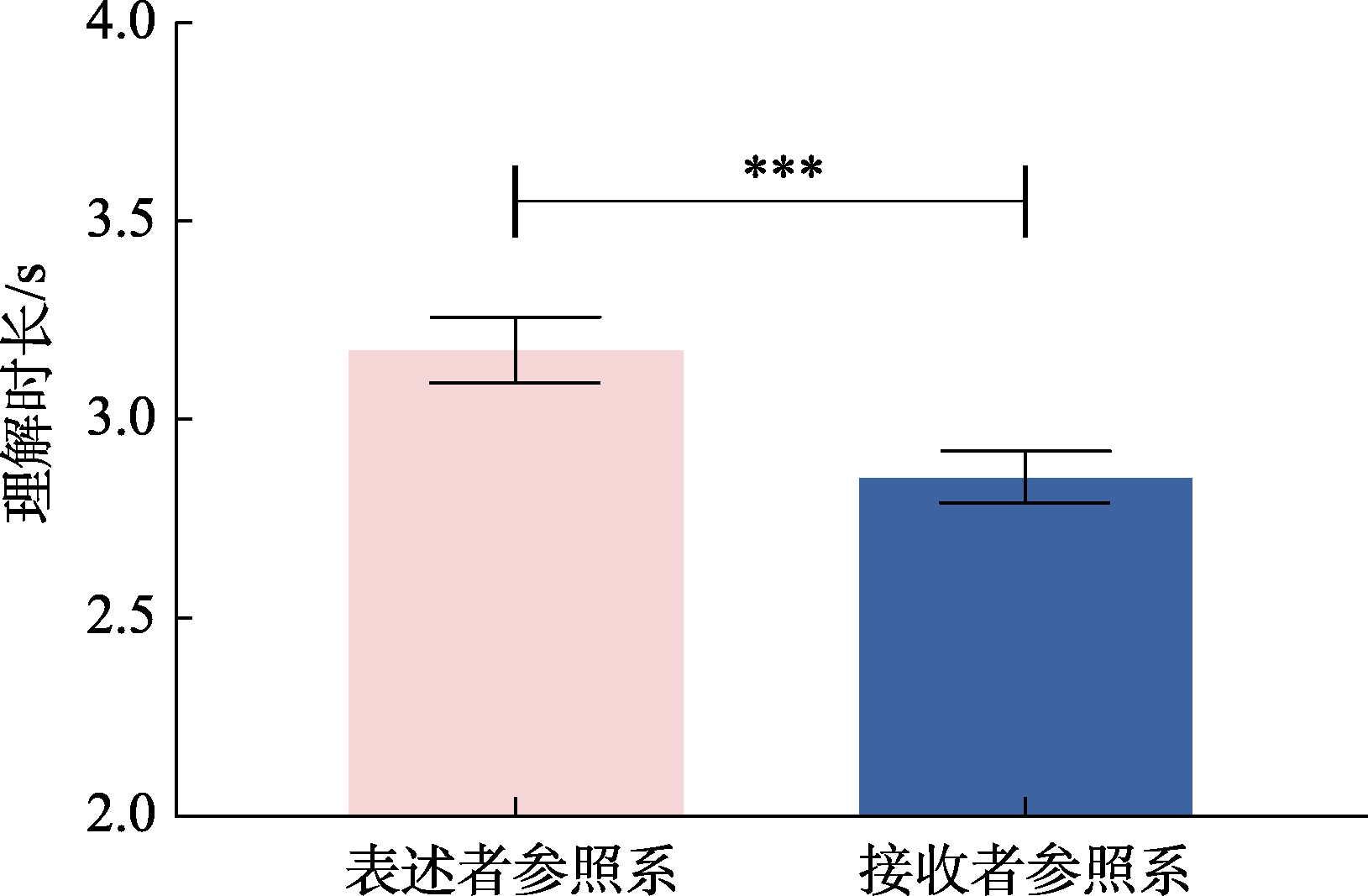
图19 第三人称俯视视角下不同参照系表述语句的理解时长
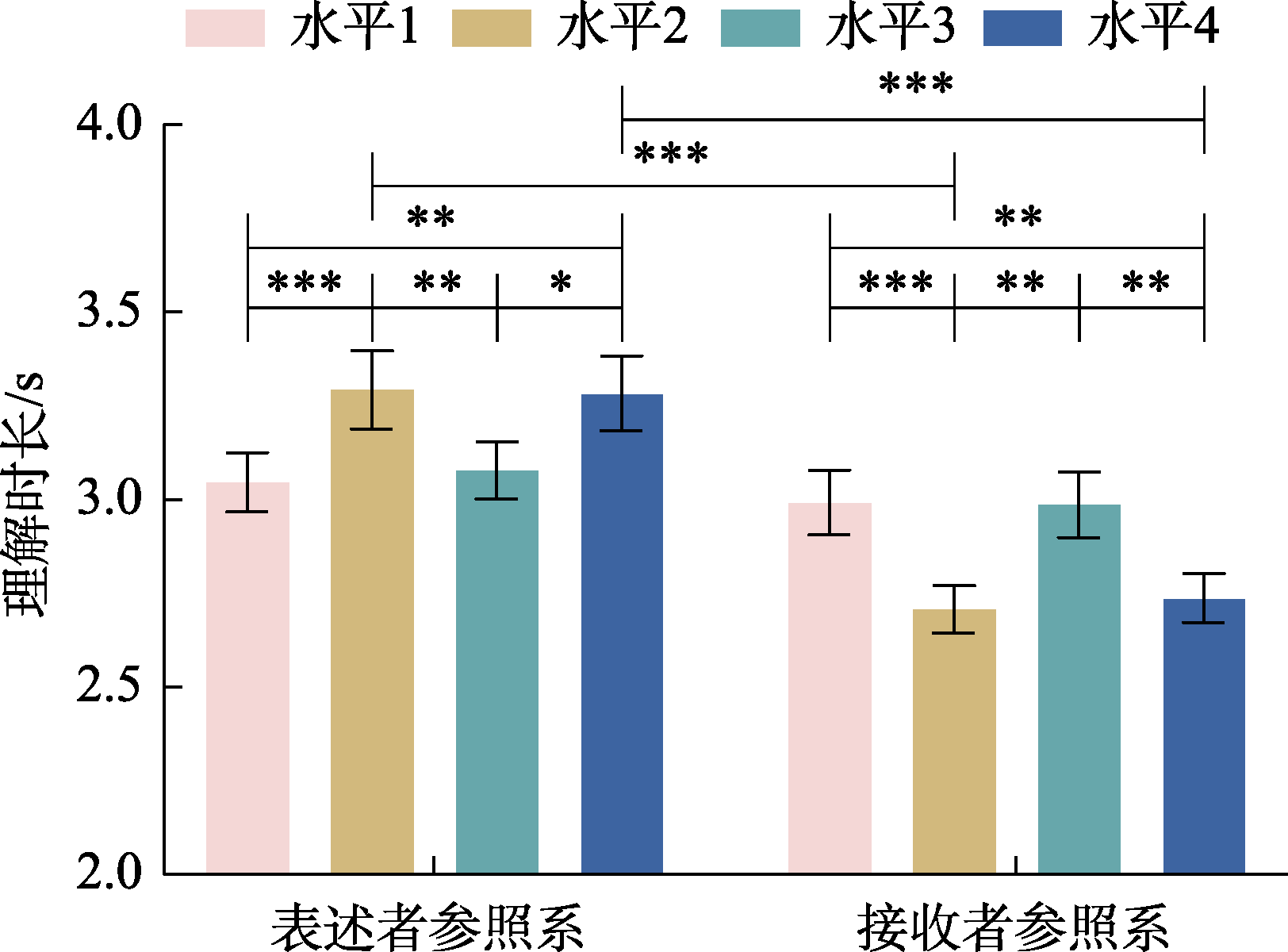
图20 第三人称俯视视角不同空间线索一致性水平下对两种参照系表述语句的理解时长
| 响应变量:理解正确性 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 83.30% | 27666.65 | 27679.91 | 1 | 5598 | 6.83 | 0.009 | 0.001 |
| 语句参照系 | 1 | 5598 | 6.83 | 0.009 | 0.001 | |||
| 2 | 83.40% | 28341.70 | 28354.95 | 7 | 5592 | 36.56 | <0.001 | 0.044 |
| 一致性水平×语句参照系 | 6 | 5592 | 41.84 | <0.001 | 0.043 | |||
| 3 | 88.70% | 34468.34 | 34481.60 | 13 | 5586 | 46.05 | <0.001 | 0.097 |
| 目标物体 | 6 | 5586 | 76.45 | <0.001 | 0.074 | |||
表15 理解正确性的逐步回归模型摘要(N = 100 × 56 = 5600)
| 响应变量:理解正确性 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 准确率 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 83.30% | 27666.65 | 27679.91 | 1 | 5598 | 6.83 | 0.009 | 0.001 |
| 语句参照系 | 1 | 5598 | 6.83 | 0.009 | 0.001 | |||
| 2 | 83.40% | 28341.70 | 28354.95 | 7 | 5592 | 36.56 | <0.001 | 0.044 |
| 一致性水平×语句参照系 | 6 | 5592 | 41.84 | <0.001 | 0.043 | |||
| 3 | 88.70% | 34468.34 | 34481.60 | 13 | 5586 | 46.05 | <0.001 | 0.097 |
| 目标物体 | 6 | 5586 | 76.45 | <0.001 | 0.074 | |||
| 响应变量:理解时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 3750.29 | 3763.55 | 1 | 5598 | 125.33 | <0.001 | 0.022 |
| 语句参照系 | 1 | 5598 | 125.33 | <0.001 | 0.022 | |||
| 2 | 伽马分布 | 3588.63 | 3601.89 | 7 | 5592 | 34.92 | <0.001 | 0.042 |
| 一致性水平×语句参照系 | 6 | 5592 | 20.50 | <0.001 | 0.021 | |||
| 3 | 伽马分布 | 2520.44 | 2533.70 | 13 | 5586 | 48.90 | <0.001 | 0.102 |
| 目标物体 | 6 | 5586 | 94.51 | <0.001 | 0.091 | |||
| 4 | 伽马分布 | 2543.86 | 2557.11 | 31 | 5568 | 26.06 | <0.001 | 0.127 |
| 一致性水平×目标物体 | 18 | 5568 | 5.16 | <0.001 | 0.015 | |||
| 5a | 正态分布 | 93733.30 | 93746 55 | 13 | 5586 | 35.73 | <0.001 | 0.077 |
表16 理解时长的逐步回归模型摘要(N = 100 × 56 = 5600)
| 响应变量:理解时长 | 显著性检验 | 效应量 | ||||||
|---|---|---|---|---|---|---|---|---|
| 模型 | 分布假设 | AICC | BIC | df1 | df2 | F | p | R2/偏R |
| 1 | 伽马分布 | 3750.29 | 3763.55 | 1 | 5598 | 125.33 | <0.001 | 0.022 |
| 语句参照系 | 1 | 5598 | 125.33 | <0.001 | 0.022 | |||
| 2 | 伽马分布 | 3588.63 | 3601.89 | 7 | 5592 | 34.92 | <0.001 | 0.042 |
| 一致性水平×语句参照系 | 6 | 5592 | 20.50 | <0.001 | 0.021 | |||
| 3 | 伽马分布 | 2520.44 | 2533.70 | 13 | 5586 | 48.90 | <0.001 | 0.102 |
| 目标物体 | 6 | 5586 | 94.51 | <0.001 | 0.091 | |||
| 4 | 伽马分布 | 2543.86 | 2557.11 | 31 | 5568 | 26.06 | <0.001 | 0.127 |
| 一致性水平×目标物体 | 18 | 5568 | 5.16 | <0.001 | 0.015 | |||
| 5a | 正态分布 | 93733.30 | 93746 55 | 13 | 5586 | 35.73 | <0.001 | 0.077 |

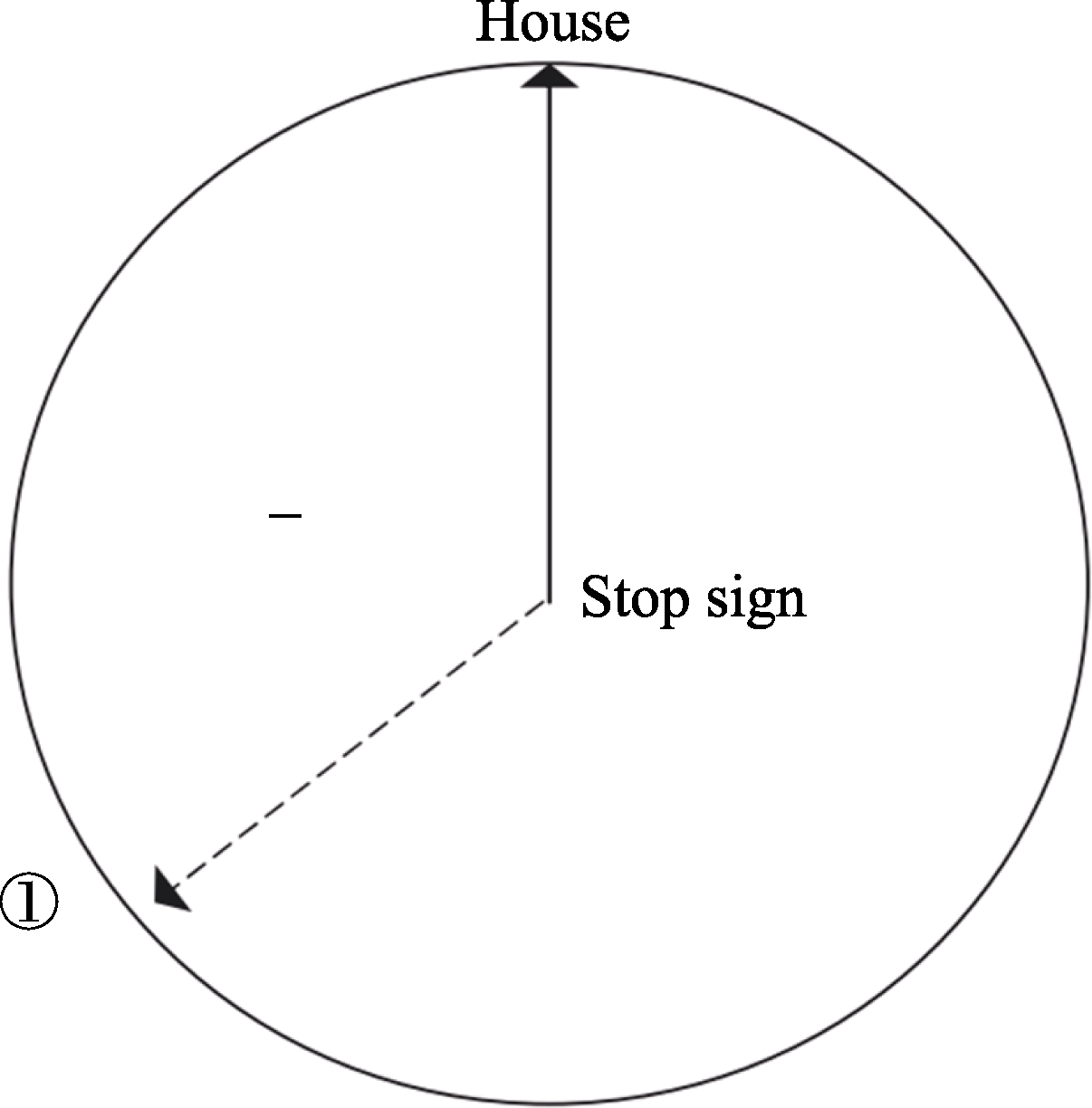
例如, 题目1:想象你在stop标识牌的位置, 面向房子, 指出红绿灯的方位

| [1] | Blake R., & Fox R. (1973). The psychophysical inquiry into binocular summation. Perception & Psychophysics, 14(1), 161-185. |
| [2] |
Brennan S. E., & Hanna J. E. (2009). Partner‐specific adaptation in dialog. Topics in Cognitive Science, 1(2), 274-291.
doi: 10.1111/j.1756-8765.2009.01019.x pmid: 25164933 |
| [3] |
Burgess N. (2006). Spatial memory: How egocentric and allocentric combine. Trends in Cognitive Sciences, 10(12), 551-557.
doi: 10.1016/j.tics.2006.10.005 pmid: 17071127 |
| [4] | Burigo M., & Schultheis H. (2018). The effects of direction and orientation of located objects on spatial language comprehension. Language and Cognition, 10(2), 298-328. |
| [5] | Carlson L. A. (1999). Selecting a reference frame. Spatial Cognition and Computation, 1(4), 365-379. |
| [6] |
Chen L. (1982). Topological structure in visual perception. Science, 218(4573), 699-700.
pmid: 7134969 |
| [7] | Chen L. (1984). Gestalt laws of proximity and similarity and tolerance spaces. Acta Psychologica Sinica, 16(3), 259-266. |
| [陈霖. (1984). 格式塔和容限空间. 心理学报, 16(3), 259-266.] | |
| [8] | Chen L. (2005). The topological approach to perceptual organization. Visual Cognition, 12(4), 553-637. |
| [9] | Clark H. H. (1996). Using language. Cambridge University Press. |
| [10] |
Clark H. H., & Wilkes-Gibbs D. (1986). Referring as a collaborative process. Cognition, 22(1), 1-39.
pmid: 3709088 |
| [11] | Davis J. K. (1991). Educational implications of field dependence-independence.In S. Wapner & J. Demick (Eds.), Field dependence-independence: Cognitive style across the life span (pp. 149-175). Lawrence Erlbaum Associates. |
| [12] | Davis J. K., & Cochran K. F. (1989). An information processing view of field dependence-independence. Early Child Development and Care, 43(1), 129-145. |
| [13] | Duran N. D., Dale R., & Kreuz R. J. (2011). Listeners invest in an assumed other’s perspective despite cognitive cost. Cognition, 121(1), 22-40. |
| [14] | Enticott P. G., Ogloff J. R., & Bradshaw J. L. (2006). Associations between laboratory measures of executive inhibitory control and self-reported impulsivity. Personality and Individual Differences, 41(2), 285-294. |
| [15] | Galati A., & Avraamides M. N. (2012). Collaborating in spatial tasks: Partners adapt the perspective of their descriptions, coordination strategies, and memory representations. In Spatial Cognition VIII:International Conference, Spatial Cognition 2012, Kloster Seeon, Germany, August 31-September 3, 2012. Proceedings 8 (pp. 182-195). Springer Berlin Heidelberg. |
| [16] |
Galati A., & Avraamides M. N. (2013). Flexible spatial perspective-taking: Conversational partners weigh multiple cues in collaborative tasks. Frontiers in Human Neuroscience, 7, 618.
doi: 10.3389/fnhum.2013.00618 pmid: 24133432 |
| [17] |
Galati A., & Avraamides M. N. (2015). Social and representational cues jointly influence spatial perspective-taking. Cognitive Science, 39(4), 739-765.
doi: 10.1111/cogs.12173 pmid: 25243841 |
| [18] | Galati A., Dale R., & Duran N. D. (2019). Social and configural effects on the cognitive dynamics of perspective-taking. Journal of Memory and Language, 104, 1-24. |
| [19] | Galati A., Diavastou A., & Avraamides M. N. (2018). Signatures of cognitive difficulty in perspective-taking: Is the egocentric perspective always the easiest to adopt? Language, Cognition and Neuroscience, 33(4), 467-493. |
| [20] | Galati A., Michael C., Mello C., Greenauer N. M., & Avraamides M. N. (2013). The conversational partner’s perspective affects spatial memory and descriptions. Journal of Memory and Language, 68(2), 140-159. |
| [21] | Goeke C., Kornpetpanee S., Köster M., Fernández-Revelles A. B., Gramann K., & König P. (2015). Cultural background shapes spatial reference frame proclivity. Scientific Reports, 5(1), 11426. |
| [22] | Gramann K., Müller H. J., Eick E. M., & Schönebeck B. (2005). Evidence of separable spatial representations in a virtual navigation task. Journal of Experimental Psychology: Human Perception and Performance, 31(6), 1199-1223. |
| [23] | Hardin J. W., & Hilbe J. M. (2012). Generalized linear models and extensions (3rd ed.). Stata Press. |
| [24] | Hegarty M., & Waller D. (2004). A dissociation between mental rotation and perspective-taking spatial abilities. Intelligence, 32(2), 175-191. |
| [25] | Henson D. B. (1993). Visual fields. Oxford University Press. |
| [26] |
Horton W. S., & Keysar B. (1996). When do speakers take into account common ground? Cognition, 59(1), 91-117.
pmid: 8857472 |
| [27] | Hox J., Moerbeek M., & Van de Schoot R. (2017). Multilevel analysis: Techniques and applications (3rd ed.). Routledge. |
| [28] | Keysar B., Barr D. J., Balin J. A., & Paek T. S. (1998). Definite reference and mutual knowledge: Process models of common ground in comprehension. Journal of Memory and Language, 39(1), 1-20. |
| [29] | Keysar B., Barr D. J., & Horton W. S. (1998). The egocentric basis of language use: Insights from a processing approach. Current Directions in Psychological Science, 7(2), 46-49. |
| [30] | Kronmüller E., & Barr D. J. (2015). Referential precedents in spoken language comprehension: A review and meta-analysis. Journal of Memory and Language, 83, 1-19. |
| [31] | Lemaignan S., Warnier M., Akin Sisbot E., Clodic A., & Alami R. (2017). Artificial cognition for social human- robot interaction: An implementation. Artificial Intelligence, 247, 45-69. |
| [32] | Li S. X., & Song G.W. (1994). A study on the congnitive styles of senior middle school students. Acta Psychologica Sinica, 26(4), 378-384. |
| [李寿欣, 宋广文. (1994). 关于高中生认知方式的测验研究. 心理学报, 26(4), 378-384.] | |
| [33] | Ma B. C. (2021). The influence of layout and spatial perspective on the choosing and understanding of spatial reference [Unpublished master’s thesis]. Hangzhou: Zhejiang Sci-tech University. |
| [马奔川. (2021). 场景特征、空间视角对言语参照系建构与理解的影响 (硕士学位论文). 杭州: 浙江理工大学.] | |
| [34] | McNamara T. P. (2002, May). How are the locations of objects in the environment represented in memory? In International conference on spatial cognition (pp. 174-191). Springer Berlin Heidelberg. |
| [35] | Mou W., & McNamara T. P. (2002). Intrinsic frames of reference in spatial memory. Journal of Experimental Psychology: Learning, Memory, and Cognition, 28(1), 162-170. |
| [36] |
Newman-Norlund S. E., Noordzij M. L., Newman-Norlund R. D., Volman I. A., De Ruiter J. P., Hagoort P., & Toni I. (2009). Recipient design in tacit communication. Cognition, 111(1), 46-54.
doi: 10.1016/j.cognition.2008.12.004 pmid: 19201397 |
| [37] |
Peer M., Brunec I. K., Newcombe N. S., & Epstein R. A. (2021). Structuring knowledge with cognitive maps and cognitive graphs. Trends in Cognitive Sciences, 25(1), 37-54.
doi: 10.1016/j.tics.2020.10.004 pmid: 33248898 |
| [38] | Ryskin R. A., Brown-Schmidt S., Canseco-Gonzalez E., Yiu L. K., & Nguyen E. T. (2014). Visuospatial perspective- taking in conversation and the role of bilingual experience. Journal of Memory and Language, 74, 46-79. |
| [39] |
Ryskin R. A., Wang R. F., & Brown-Schmidt S. (2016). Listeners use speaker identity to access representations of spatial perspective during online language comprehension. Cognition, 147, 75-84.
doi: 10.1016/j.cognition.2015.11.011 pmid: 26638050 |
| [40] | Schober M. F. (2009). Spatial dialogue between partners with mismatched abilities. In K. R. Coventry, T. Tenbrink, & J. A. Bateman (Eds.), Spatial language and dialogue (pp. 23-39). Oxford University Press. |
| [41] |
Shelton A. L., & McNamara T. P. (2001). Visual memories from nonvisual experiences. Psychological Science, 12(4), 343-347.
pmid: 11476104 |
| [42] |
Shintel H., & Keysar B. (2009). Less is more: A minimalist account of joint action in communication. Topics in Cognitive Science, 1(2), 260-273.
doi: 10.1111/j.1756-8765.2009.01018.x pmid: 25164932 |
| [43] | Song. H. Y. (1988). The preparation and revision note of Cognitive Style Figure Test. In S. J. Xie, & H. C. Zhang (Eds.), Selected papers on cognitive style (pp. 261-276). Beijing: Beijing Normal University Press. |
| [宋合义. (1988). 认知方式图形测验的编制与修订说明. 见谢斯骏, 张厚粲 (编), 认知方式 (pp. 261-276). 北京: 北京师范大学出版社 ] | |
| [44] | Taylor H. A., & Tversky B. (1996). Perspective in spatial descriptions. Journal of Memory and Language, 35(3), 371-391. |
| [45] | Tosi A., Pickering M. J., & Branigan H. P. (2020). Speakers’ use of agency and visual context in spatial descriptions. Cognition, 194, 104070. |
| [46] |
Vukovic N., & Williams J. N. (2015). Individual differences in spatial cognition influence mental simulation of language. Cognition, 142, 110-122.
doi: 10.1016/j.cognition.2015.05.017 pmid: 26036923 |
| [47] | Wang D. M., Ma B. C., Tian Y., Wang Q. J., & Wang C. H. (2021). Selection of reference frame in spatial communication and its influencing factors. Space Medicine & Medical Engineering, 34(5), 399-406. |
| [王笃明, 马奔川, 田雨, 王琦君, 王春慧. (2021). 空间语言交互中参照系的选择及其影响因素. 航天医学与医学工程, 34(5), 399-406.] | |
| [48] | Xiao C. L., Fan Y., Xu L. F., & Zhou R. L. (2019). Human- centered human-robot natural spatial language interaction. Chinese Journal of Applied Psychology, 25(4), 319-331. |
| [肖承丽, 范丫, 徐刘飞, 周仁来. (2019). 以人为中心的人-机器人自然空间语言交互. 应用心理学, 25(4), 319-331.] | |
| [49] |
Xiao C. L., Sui Y. Q., Xiao S. H., & Zhou R. L. (2021). A new perspective on spatial interaction research: The effects of multiple social factors. Advances in Psychological Science, 29(5), 796-805.
doi: 10.3724/SP.J.1042.2021.00796 |
|
[肖承丽, 隋雨檠, 肖苏衡, 周仁来. (2021). 空间交互研究新视角: 多重社会因素的影响. 心理科学进展, 29(5), 796-805.]
doi: 10.3724/SP.J.1042.2021.00796 |
|
| [50] | Xie C. X., Liu Q., Li A. J., Tao W. D., & Sun H. J. (2009). Frame of reference in the mental representation of objects layout. Acta Psychologica Sinica, 41(5), 414-423. |
| [谢超香, 刘强, 黎安娟, 陶维东, 孙弘进. (2009). 空间场景表征中的参照系选取. 心理学报, 41(5), 414-423.] | |
| [51] | You X. Q. (Ed). (2017). Aviation psychology: Theory, practice and application. Hangzhou: Zhejiang Education Publishing House. |
| [游旭群. (主编). (2017). 航空心理学: 理论, 实践与应用. 杭州: 浙江教育出版社.] | |
| [52] | You X. Q. & Yu L. S. (2000). The relationship between cognitive profile, field-independence and spatial orientation in flight. Acta Psychologica Sinica, 32(2), 158-163. |
| [游旭群, 于立身. (2000). 认知特征、场独立性与飞行空间定向关系的研究. 心理学报, 32(2), 158-163.] | |
| [53] | Zhang J. Q., Yan H. F., Chu J. D., & Li C. B. (2021). Statistical analysis of randomized complete block design with repeated measure data using Generalized Linear Mixed Models (GLIMMIX). Acta Agronomica Sinica, 47(2), 294-304. |
|
[张久权, 闫慧峰, 褚继登, 李彩斌. (2021). 运用广义线性混合模型分析随机区组重复测量的试验资料. 作物学报, 47(2), 294-304.]
doi: 10.3724/SP.J.1006.2021.04085 |
|
| [54] | Zhang Q. (2017). The development and validation of the measurement tool for three dimensional perspective taking spatial ability [Unpublished master’s thesis]. Hangzhou: Zhejiang Sci-tech University. |
| [张琪. (2017). 三维视角转换空间能力测量工具的开发与验证 (硕士学位论文). 杭州: 浙江理工大学.] | |
| [55] | Zhao X. N., & You X. Q. (2007). The experimental research about the influence of field cognition mode on mental rotation. Chinese Journal of Applied Psychology, 13(4), 334-340. |
| [赵晓妮, 游旭群. (2007). 场认知方式对心理旋转影响的实验研究. 应用心理学, 13(4), 334-340.] | |
| [56] | Zhou J. F., Xu H. K., Tang N., Shi B. H., Zhao Y., Gao T., & Shen M. W. (2016). The “strong-cognition” psychology research: Implications of AlphaGo. Chinese Journal of Applied Psychology, 22(1), 3-11. |
| [周吉帆, 徐昊骙, 唐宁, 史博皓, 赵阳, 高涛, 沈模卫. (2016). “强认知”的心理学研究:来自AlphaGo的启示. 应用心理学, 22(1), 3-11.] |
| [1] | 宋晓蕾, 李宜倩, 张凯歌. 虚拟环境中大尺度空间定向能力的地域差异[J]. 心理学报, 2024, 56(1): 1-14. |
| [2] | 吕馨, 刘景瑶, 魏柳青, 张学民. 目标数量与运动框架旋转角度对不同场认知风格个体多目标追踪表现的影响[J]. 心理学报, 2019, 51(1): 24-35. |
| [3] | 谢超香,刘强,黎安娟,陶维东,孙弘进. 空间场景表征中的参照系选取 [J]. 心理学报, 2009, 41(05): 414-423. |
| [4] | 赵民涛,牟炜民. 多视点学习条件下空间表征的朝向特异性[J]. 心理学报, 2005, 37(03): 308-313. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||