

1 引言
对于人类和其他生活在复杂环境中的动物(如蝙蝠)而言, 空间导航是一项重要的认知功能(Genzel et al., 2018; Goldshtein et al., 2022)。高效的空间导航需要对空间信息进行有效的心理表征(mental representation), 这种表征是对外界信息和客观知识的内部主观形式, 不同于常见的外部客观形式, 如制图师制作的平面地图以及目前被大众广泛使用的智能手机导航软件(如高德地图)。空间知识的内部表征对于人们在熟悉环境下的导航行为至关重要, 可以通过调用已存储的空间知识灵活设计出行路线(Harten et al., 2020), 进而节约导航时间。有研究表明, 长期依赖于导航软件可能会导致空间记忆和导航能力的退化(Dahmani & Bohbot, 2020), 因此空间知识的内部表征机制具有重要的理论意义和研究价值。
由于空间知识的内部表征能够为路线规划、捷径选择等高级认知行为提供帮助, 在功能上类似于地理学意义上制作的地图, 因此也被称为认知地图(cognitive map)。认知地图这一概念最早由Tolman (1948)提出, Tolman发现随着练习次数增加大鼠在迷宫任务中的空间导航行为会逐渐优化, 能够选择学习阶段未经历过的新异捷径抵达目标, 这表明大鼠并非仅仅建立刺激−反应的简单联结序列, 而是理解了环境的整体空间结构, 主动选择重要线索从而建构出独立于自身而存在的环境全景地图(allocentric comprehensive map)。
鉴于目前对于认知地图的构建规则、精确程度、表征形式等方面的了解仍然有限, 并且不同研究者持有迥异的见解, 本研究通过文献回顾对认知神经科学领域的认知地图相关理论和实验研究进行梳理, 以期为多学科的认知地图研究者提供启发。本研究首先基于行为现象和功能视角归纳认知地图所表现出的典型属性, 进一步阐述参与认知地图构建的相关脑区及其作用机制, 随后总结在认知地图存在形式方面既有的理论争议, 最后对认知地图这一思想进行反思并展望未来空间表征和认知地图领域的重要问题和研究方向。
2 认知地图的典型属性
认知地图并非对空间知识进行完全保真的复制, 而是具有突出的心理属性, 具体表现为根据任务需求对不同空间信息进行选择性的加工和存储, 这种片面的信息加工进一步导致了扭曲性的存在。其次, 为了应对复杂多变的环境, 空间表征还具有灵活性, 对同一信息容忍表征形式上的冗余性。此外, 由于可导航空间通常具有嵌套结构, 这类嵌套空间的认知地图会表现出层级性, 不过随着在嵌套环境中的导航经验增加, 认知地图的层级性也会下降, 逐渐变得连贯。
2.1 选择性和扭曲性
认知资源是有限的, 所以空间表征在内容上需要具有选择性, 从而提高认知的经济性。以往心理学、经济学以及人工智能等多学科的标准观点是人对包括导航在内的任务形成完整而固定的表征, 并使用启发式来规划后续行为, 然而Ho等人(2022)发现针对具体问题人们会灵活地对环境形成特定的简化表征, 以此来平衡任务表征的复杂度与实用性。
虽然位置、路径关系、方向等多方面的信息都可以归入空间知识的范畴, 但是在具体的实用情境下, 认知地图的内容可能只涵盖其中一部分。正如Borges (1971)在《论科学的精确性》这篇科幻小说中所揭示的, 当制作的地图详尽地包含了真实地理环境中的所有信息时, 这幅巨大的地图实际上却是无用的。不加选择地表征所有信息, 既浪费认知资源, 又无法高效地解决特定问题。比如在一座城市旅行时, 交通工具的种类决定了合适的地图种类, 骑行需要非机动车道的地图, 而自驾游则需要机动车道的地图, 显然卫星拍摄的城市详细地图则是无法直接使用的。
2.2 灵活性和冗余性
灵活地运用已习得的知识对于动物应对复杂的外界环境和不可预知的挑战十分重要。动物的生存环境并非一成不变, 比如原来通行的路径被障碍物阻断、原有的食物资源不知去向等, 高效导航的重要表现之一是应对环境线索和结构动态变化的能力(Kabadayi et al., 2018), 而认知地图的灵活性可能是这种能力的基础。
在灵活性的背后是空间表征和认知地图形式的冗余性, 为了能够支持灵活的导航行为, 相同的空间信息可能需要同时以多种形式加以组织和存储(Yousif, 2022)。相同的信息或内容在不同条件或要求下的最佳呈现方式可能有很大差异, 比如电子文件的多种格式属性不同但都有其独特功能(PDF文件便于查看, 而Word文档便于修改等)、问题的表述形式也会对解决问题的效率产生极大影响。同理, 对于同样的空间信息, 最佳的认知地图形式会随具体的功能需求不同而不同, 因此大脑需要以多重格式冗余地表征信息以备调用。
2.3 层级性和连贯性
可导航空间往往是嵌套的环境, 包含不同的子区域, 如校园的不同建筑以及每个建筑内的不同房间, 导航系统对不同局部区域的表征可能是彼此分离的, 要建立对环境整体的认知地图, 就需要整合通过离散学习获得的不同局部区域的信息, 以合理的方式加以组织。不同局部区域的信息之所以是分离的, 是因为可导航空间包括单视点空间(vista space)和环境空间(environmental space)两类(Meilinger et al., 2016), 前者从同一位置可以统览全局空间的属性, 如卧室、旷场(图1a); 后者由于存在障碍物遮挡所以需要导航者在其间穿梭运动并整合在每个单视点空间中学习到的信息, 如街区、迷宫(图1b)。
图1
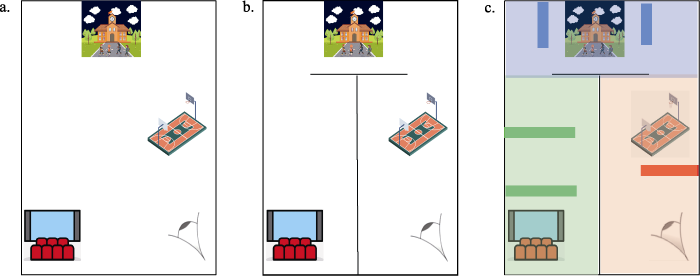
图1
单视点空间(a)、环境空间(b)和嵌套的环境空间(c)示意图。在单视点空间中, 从一个位置或视点可以总览空间内的所有物体或位置。在环境空间中, 由于存在遮挡, 需要在障碍物之间不断移动和穿梭, 分别观察和学习每个单视点空间中的信息, 随后整合形成全局空间认知。在嵌套空间中, 每个区域可能包含多个子区域, 如图中三种颜色背景代表三个不同区域, 每个区域内部又有由彩色线段分隔开的多个子区(类似于不同小区内部进一步分成不同单元)。彩图见电子版。
在嵌套的环境空间内(图1c), 不同局部区域的信息可能是以层级化(hierarchical)的方式加以组织的。McNamara (1986)发现空间启动、方向判断以及欧氏距离估计任务表现都会受到不同位置是否在相同区域的影响。在分段化的平行走廊中人的空间记忆会按照每个走廊的局部坐标系统进行组织, 表明对不同局部区域的表征是分离的(Meilinger et al., 2016)。此外, 人在进行空间关系判断时所表现出的扭曲支持了认知地图具有层级性(Stevens & Coupe, 1978)。不过层级性并非持续存在, 不同局部区域可能会随着学习逐渐发生整合, 形成统一连贯的整体。早期就有研究显示, 不同区域的共同地标可以促进新的局部信息整合到已有的空间知识中(Golledge et al., 1993)。
3 认知地图的神经机制
认知地图神经机制研究最早关注的是顶叶皮层, 顶叶受损的患者会表现出空间导航能力的减弱甚至丧失。之后位置细胞的发现让研究者们聚焦于海马结构(hippocampus), 并且进一步发现了头朝向细胞以及内嗅皮层(entorhinal cortex)的网格细胞和边界细胞, 表明海马−内嗅系统是认知地图的关键区域。此外, 内侧前额叶、眶额叶以及场景选择性区域也在认知地图的形成过程中发挥重要作用。
3.1 海马−内嗅系统
O’ Keefe和Dostrovsky (1971)首次在啮齿类动物的海马中记录到位置细胞(place cell)的存在, 这些细胞在动物处于特定位置时才会发放(图2a), 由此表明海马能够编码空间位置。除了位置元素以外, 后续研究陆续发现了海马结构中编码方向、环境边界等其他空间信息的多种类型的细胞, 如网格细胞(grid cell)、头朝向细胞(head direction cell)、边界细胞(border cell)等(Hafting et al., 2005; Taube et al., 1990; Lever et al., 2009)。其中内嗅皮层的网格细胞在动物处于平铺环境的等边三角形顶点处发放(图2b), 并且表现出六重的旋转对称性(sixfold symmetry) (Hafting et al., 2005; Doeller et al., 2010), 即每个网格细胞发放的位置点在旷场中排列成周期性的正六边形(也可视为6个等边三角形的组合), 不仅为空间位置提供背景标度, 也能够计算从当前位置到导航目标的方向(Bellmund et al., 2016)。
图2
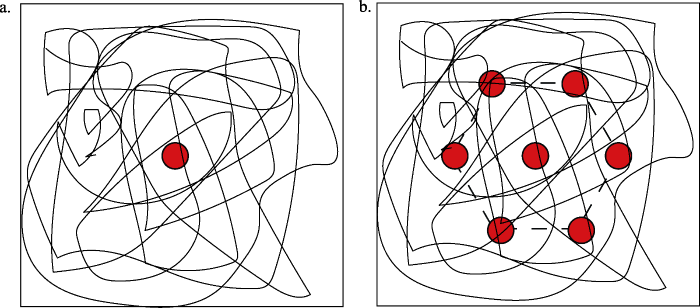
图2
海马位置细胞(a)和内嗅皮层网格细胞(b)的放电模式示意图。黑色线代表动物在方形区域内的奔跑轨迹, 红色点代表细胞发放(spikes)的峰值位置, 叠加在运动轨迹上。位置细胞只有单一的放电位置, 而网格细胞的放电位置构成了周期性的六边形(或6个正三角形) (改编自Moser et al., 2008)。
海马−内嗅系统对于欧式度量信息和拓扑连接关系的表征都十分重要。神经影像学研究发现, 海马和内嗅皮层能够编码位置间的欧氏距离和路径距离, 并且海马长轴还存在功能分区, 其中前部与欧式距离相关, 后部则与路径距离相关(Morgan et al., 2011; Howard et al., 2014)。海马活动对欧式距离的敏感源于内嗅皮层(entorhinal cortex, ERC)的信息输入, 内嗅皮层网格细胞的多峰发放域为空间表征提供了规则的网格背景(Hafting et al., 2005), 不过内嗅皮层的信息输入对海马空间表征的重新组织(或称重映射, remapping)并不是必要的(Schlesiger et al., 2018)。海马结构也表征环境的拓扑信息, 在受约束的、由不同通道相连构成的迷宫中, 啮齿类动物的海马位置域由相对于迷宫拓扑结构的位置决定, 而非欧式空间中的绝对位置(Dabaghian et al., 2014), 此外在休息期间位置细胞的序列化重激活也反映了迷宫的拓扑结构(Wu & Foster, 2014)。在虚拟街道中导航时人类海马后部信号与未来可能经历的路径连接边数量相关, 而海马前部信号则与环境整体的拓扑学性质相关(Javadi et al., 2017)。
海马结构参与实现认知地图的灵活性。Widloski和Foster (2022)在迷宫任务中记录大鼠的海马细胞活动, 通过改变障碍物的分布不断变化迷宫的结构和食物位置, 发现大鼠可以灵活调整觅食路线, 并且在休息期间海马细胞的“重放/重激活(replay/reactivation)”能够预测未来路线和障碍物规避情况; 在此过程中大部分位置细胞的位置域保持稳定, 只有少部分会随着障碍物分布变化而变化, 而这部分“不稳定”细胞可能与大鼠灵活应对空间布局变化的行为表现紧密相关。
海马−内嗅系统在认知地图的层级性组织中也发挥重要作用。环境中不同的局部区域在新学习时是分离表征的, 人类导航的行为研究和啮齿类动物导航的电生理研究均支持这一点, 例如人类的空间记忆会受到环境中障碍物的影响, 依据障碍物分割环境的形状来形成局部的参考系(Meilinger et al., 2016); 啮齿类动物的内嗅网格细胞和海马位置细胞会对局部区域分别创建独立的局部地图, 具体表现为网格域和位置域局限在局部环境内(Alme et al., 2014)。不过, 长时间在多隔间的空间内导航也会引起隔间边界影响的减弱甚至消失, 具体表现为网格细胞的发放域扩展到全局空间(Carpenter et al., 2015)。尽管最初学习时啮齿类动物和人都倾向于将局部表征分离, 然而在具有多个局部区域的环境中经历长时间、丰富的穿梭体验之后, 啮齿类动物的网格细胞发放域会快速移动, 从之前离散的局部网格域转变为连续的全局网格域, 通过这种方式来逐步整合局部区域表征, 最终形成全局一致的认知地图(Wernle et al., 2018), 在人类中则没有发现这种现象, 人类在多区域环境下的丰富导航经验并不一定会导致局部表征的整合(Zhao, 2018), 但也有可能是研究人类对象的实验范式不同导致的。
3.2 场景选择区域
视觉场景是小尺度局部环境表征的主要部分, 正确识别场景或位置对人们的日常生活具有重要意义, 其表征需要皮层网络的参与。视觉场景的加工系统并不是表征可导航空间的海马−内嗅系统, 而是场景选择区域(scene-selective regions)。此区域在观看场景时发生强烈反应, 包括旁海马位置区(parahippocampal place area, PPA)、枕叶位置区(occipital place area, OPA)和压后皮层复合体(retrosplenial complex, RSC)这三个功能子区域(Dilks et al., 2022)。
总体而言, 场景选择区域参与“缝合”多个离散的单视点空间, 为导航者的空间表征编织一个360°全景视图, 包括当前视野内外的空间信息, 此外当前场景的信息还会启动全景环境内相关联的表征(Robertson et al., 2016)。通过这种方式, 场景选择区域的空间表征实现了短暂的空间知觉与相对持久的空间记忆之间的动态交互, 促进全局认知地图的形成。也有研究者将上述“缝合”过程称为“映射”, 即压后皮层根据单视点空间的初级感觉信息提取出认知地图, 再根据识别出的环境地标对认知地图的布局进行调整和实时更新, 从而完成认知地图与现实环境的映射, 进而保持认知地图与现实空间布局的一致性(梁群君 等, 2022)。
3.3 前额叶
以往研究一般认为, 认知地图和空间导航的核心脑网络由海马−内嗅系统和场景选择区域共同构成, 但是却忽略了前额叶(prefrontal cortex, PFC)在适应环境变化、追踪和提前规划以规避风险等方面的关键作用, 可能有如下三个原因导致大部分研究者并不重视前额叶对空间表征的重要性。首先, 前额叶损伤一般会严重损伤执行功能(Shallice & Burgess, 1991), 这自然会导致大多数任务都表现更差, 而不特异于空间任务; 其次, 早期研究中损毁大鼠的内侧前额叶似乎并不影响在水迷宫等导航任务中的表现(Lacroix et al., 2002; Sloan et al., 2006); 最后, 前额叶存在位置细胞和网格细胞相似编码的实验证据总体上更少并且出现也相对较晚(Park et al., 2021; Jacobs et al., 2013)。
已有研究发现前额叶的不同子区域表现出功能上的差异。背外侧前额叶(dorsolateral PFC, dlPFC)和腹外侧前额叶(ventrolateral PFC, vlPFC)在由障碍物导致的绕路过程中出现活动, 因此可能参与路线的重新规划(Javadi et al., 2019)。内侧前额叶(mPFC)与自我中心的空间表征有关, 在导航者记住自我中心的目标位置时能够编码基于物体间相对关系的认知地图(Zhang & Naya, 2020), 也能产生有效行为序列的重激活(Kaefer et al., 2020), 参与对环境空间拓扑学上有组织的表征(Sauer et al., 2022), 背内侧前额叶还会参与分离任务相关和任务无关的空间背景(Mahmoodi et al., 2023)。眶额叶(orbitofrontal cortex, OFC)表征任务的状态空间(Schuck et al., 2016) (如价值空间、特征空间), 把对环境的空间表征与行为的价值整合起来, 形成可能的决策地图, 也参与相同空间背景内表征内容的压缩(Muhle-Karbe et al., 2023)。此外, 背侧前扣带回(dorsal anterior cingulate cortex, dACC)参与路径网络的层级编码(Anggraini et al., 2018), 并且能抑制错误的择路倾向(Javadi et al., 2019)。
鉴于前额叶空间表征内容的多样性, Patai和Spiers (2021)总结指出, 前额叶的不同区域可能分别在导航不同阶段发挥作用:在导航的开始, 内侧前额叶回忆出导航目标的位置, 交由背内侧前额叶进行路线规划, 随后若需绕路则由背侧前扣带回进行可选路线的搜索, 接着外侧前额叶会进行路线的重新规划并避免错误的捷径, 在此过程中OFC会选择特定路径并推理其潜在结果, 内侧前额叶则表征路径距离的远近, 当超出目标范围时背侧前扣带回会协助导航者原路返回。
综上可知, 作为高级脑区, 前额叶的主要角色是认知地图的运用者和操作者, 接收来自海马的空间信息(Nardin et al., 2021), 随后灵活运用于规划、推导和预测, 进而实现高效的空间导航。
3.4 海马−皮层共同作用
海马结构、场景选择区域以及前额叶在认知地图的构建中各自发挥独特的功能, 但是认知地图的某些高级属性需要多个脑区的共同作用, 而无法仅由单个脑区就能实现。多个脑区之间的共同作用可能是协同交互, 也可能是平行竞争。
认知地图的选择性可能需要海马结构与眶额叶的协同交互。在近期一项结合fMRI和计算建模的研究中, 由于刺激被嵌套在多重关系结构中, 被试在学习阶段同时会形成环境刺激的空间位置关系和预测性关系(即刺激间的转移关系)两种认知地图, 然而在随后的选择任务中仅有空间位置关系会决定奖赏额度, 建模结果表明被试的选择会越来越受到空间位置关系的影响, 行为建模得出的空间权重逐渐增大, 而预测性权重则逐渐减小, 由此表明任务需求会驱动空间位置认知地图的选择性强化和预测性认知地图的选择性弱化。而fMRI结果则表明空间权重变化的敏感脑区主要在海马, 而眶额叶则根据奖赏价值驱动海马更新对当前任务关键的认知地图(Garvert et al., 2023)。
然而, 近期另一项大鼠单细胞记录研究则提出了相反的观点, 认为海马结构和眶额叶虽然都参与认知地图的形成, 但二者之间并不是上述的简单前馈关系(即眶额叶根据任务需求驱动海马更新认知地图), 而是平行运作的, 甚至还存在竞争关系, 二者分别提取不同的特征从而形成不同的认知地图, 其中眶额叶倾向于形成反映当前任务相关性和动机性目标的表征, 而海马的信息输出则会阻碍眶额叶中的“图式细胞(schema cells)”参与构建新表征(Zong et al., 2023)。即海马更倾向于“守旧”, 提取既有的任务图式, 抑制新图式的形成; 而眶额叶则倾向于动态反映任务相关的目标, 形成或灵活选择新的认知地图。因此, 未来研究需要进一步探索眶额叶和海马在实现认知地图的选择性上分别发挥什么作用、二者之间的关系以及是否还有其他脑区参与。
海马和皮层的信息交互对认知地图构建过程中的分段环境表征也十分重要。有证据表明, 在有多个隔间的环境中导航时, 跨越边界会引起海马活动出现峰值, 而在此之前会先出现皮层活动模式的变化(Baldassano, 2017)。在虚拟现实的三维多室建筑内, 相比于不同房间, 当被试在同一房间内进行空间判断时反应更快, 表现出同一水平空间表征的行为启动效应, 而fMRI结果表明, 三维空间信息的分层编码受到海马和皮层的协同作用, 其中左侧海马前部表征房间内的局部信息, 而压后皮层、旁海马皮层和海马后部则表征更广泛建筑内的房间信息(Kim & Maguire, 2018)。此外, 位于纹状体的尾状核也会和海马一同与前额叶发生交互, 参与编码环境的转移结构, 共同支持灵活导航(Brown et al., 2012; Gahnstrom & Spiers, 2020)。
由于多个脑区共同参与认知地图的构建, 所以从神经结构网络的角度整合这些脑区的功能有助于更深刻地揭示认知地图的本质。认知地图的构建需要海马和皮层共同参与形成的三条功能神经环路(王琳, 王亮, 2017), 其中第一条功能环路负责将外部信息(包括空间信息和非空间信息)从皮层投射到海马进而形成内在表征; 第二条功能环路负责将海马−内嗅系统的内在表征经由压后皮质投射到后顶叶, 指导前额叶和辅助运动区, 进而转化为行为上的动作输出; 第三条功能环路负责目标奖赏, 由海马和腹侧纹状体联合表征。
4 认知地图的存在形式
对于认知地图以什么形式存在, 目前的理论争议主要包括欧式地图(Euclidean map)和拓扑图(topological graph)两种假设, 二者分别位于表征精确度的两个极端, 欧式地图要求完全精确地表征空间位置坐标, 而拓扑图则不包含任何度量信息, 在解释真实导航行为上二者都存在一定缺陷。因此, 有研究者试图调和这两种理论, 将欧式度量信息和拓扑结构都融合在认知地图中。
4.1 欧式地图假设
图3
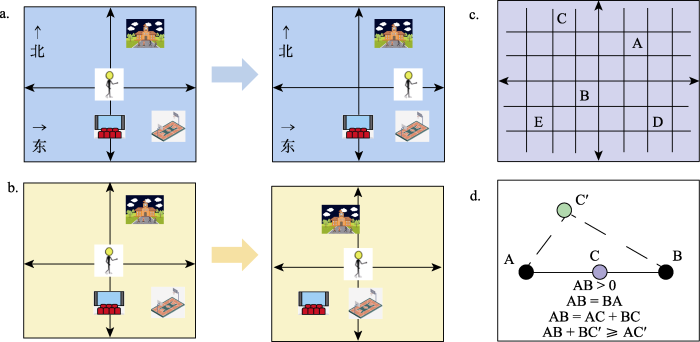
图3
a. 环境中心的参考框架(allocentric reference frame), 导航者对环境的表征不受导航者自身移动的影响; b. 自我中心的参考框架(egocentric reference frame), 导航者始终以自身为参考中心, 对环境的表征会随着自身移动而变化; c. 欧式认知地图的示意图, 包含具体的位置坐标、方向角度等全面的度量信息; d. 欧式几何的基本假定。
不过以往也有研究发现人类的空间任务表现并不符合欧式几何的基本假定(Beals et al., 1968; Tversky, 1981), 这对欧式认知地图假设提出了挑战。欧式度量空间的必要条件是该空间内的距离度量要满足如下假定:(1)非负性:点A与其自身的距离为0, 两个不同的点A、B之间的距离大于0; (2)对称性:AB = BA; ③可加性:若C为线段AB上的点, 则AB = AC + BC; (3)三角不等性:对于任意三点A、B、C, AC + BC ≥ AC (图3d)。此外, 若A、B、C三点构成直角三角形, 还应满足勾股定理。实验证据显示, 方向和位置节点的数量都会影响显式的(explicit)距离估计, 判断一个地标与非地标之间的距离要比相反的情况更小(Burroughs & Sadalla, 1979; Moar & Carleton, 1982), 因此不符合对称性; 而路径上位置点数量越多, 距离估计会更大(Thorndyke, 1981), 因此不符合可加性; 此外距离估计也并不符合三角不等性(Byrne, 1979)。甚至在虚拟“虫洞”中导航却没有意识到空间扭曲和几何不一致性的存在, 表现出被试对于欧式结构的不敏感性(Warren et al., 2017)。
虽然被试在空间实验任务中往往会表现出距离估计上的较大误差, 但是这不足以否定欧式地图假设, 认知地图仍然可能是存在一定噪音的欧式地图。不过这就进一步导致欧式地图假设可能无法证伪(Warren, 2019), 因为既然度量性地图无法做到完全精确, 适度的误差是合理的, 那么就需要考虑究竟多大范围内的误差是欧式地图假设所能容忍的, 而这是一个难以严格定义的问题。
4.2 拓扑图结构假设
图4
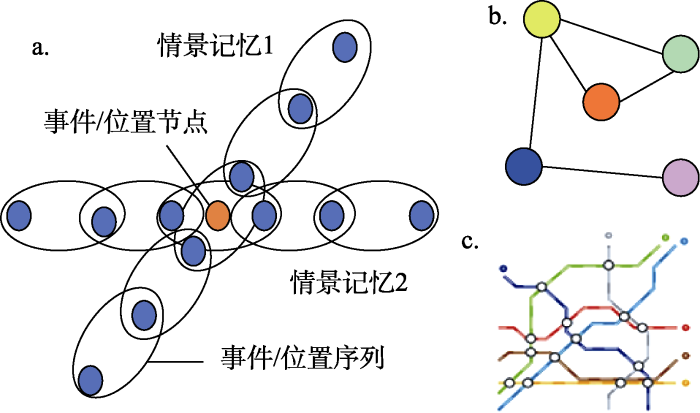
图4
a. 记忆空间理论示意图, 每个有色圆点代表特定的事件或位置, 连续发生的事件或连续经历的位置序列构成一条情景记忆, 不同情景记忆之间可能存在公共元素(红色圆点), 借此建立记忆空间(图改编自Eichenbaum et al., 1999)。 b. 拓扑图的示意图, 节点代表位置, 节点间的连接边代表位置间的转移关系。c. 地铁线路图——拓扑图在现实生活中的案例, 不同颜色线条代表不同线路, 线路上空心圆代表站点。彩图见电子版。
在记忆空间理论的启发下, 后续研究者提出了拓扑图假设作为备选的认知地图存在形式。不同于欧式地图的精确度量, 拓扑图假设认为认知地图仅仅编码粗糙的拓扑图结构。环境的拓扑图结构是由节点和节点间的连接边共同构成的网络, 一般而言节点表示位置, 而边代表位置间的路径关系(图4b)。这种“位置图(place graph)”捕获了位置间的连接性, 但不需要将位置嵌入到全局一致的坐标系统中(coordinate free)。除了位置外, 节点也可以表示特定视角(view)或局部区域(vista); 相应地, 边则是在不同视角或区域间进行转换所需要的动作(Jacobs & Schenk, 2003; Mallot & Basten, 2009)。
拓扑图的信息含量介于欧式地图和路线序列记忆之间。一方面, 图结构知识比路线知识更为丰富。路线是串联位置点和动作的简单链条, 可能只是路径网络的一部分, 只支持沿着熟悉路径的导航, 缺乏灵活性。而拓扑图则能包含两个位置之间的多条路径, 可以通过路径片段的重新组合实现新异路径或绕路。另一方面, 相比欧式地图, 拓扑图对记忆资源的占用更少, 节点和边以压缩的结构存在, 不包含任何距离度量和角度信息, 不需要对位置坐标进行详细计算操作, 但与此同时也就无法解释人类在一定程度上能够选择捷径的行为表现。所以纯粹的拓扑图表征对人的空间导航而言是不足够的。
拓扑图表征在人们的社会生活中比较常见, 譬如地铁线路图(图4c), 同一条线路上不同站台对应的位置名被等间距放置, 只突出强调站台之间的连通性, 而并没有关注或展示站台间的距离, 并且相比于城市外缘区域, 市中心的面积会被放大, 站台之间距离被高估(Longo, 2021), 侧面反映出市中心区域客流量更大, 对站点信息详细度的需求更高。动物的路线网络也有类图属性, 如卷尾猴在树枝交叉点通常会选择不同的树枝以便觅食, 表明猴子能够分割路径片段并组合成有实用价值的新路径(Presotto et al., 2018)。神经层面上也发现部分海马位置细胞的位置域会受到环境拓扑结构变化的影响(Dabaghian et al., 2014; Widloski & Foster, 2022)。
4.3 折中或融合假设
如果以度量信息的精确程度作为特征轴来定位有关认知地图存在形式的不同理论, 那么欧式地图假设和纯粹的拓扑图假设应该分别位于精确和粗略两个极端(图5a)。而另一方面, 空间表征既对环境的拓扑结构敏感, 同时也编码部分的欧式信息, 尽管可能存在一定程度的误差。因此, 有研究者试图调和两种假设形成折中方案, 即将拓扑图结构和欧式信息适度融合, 进而形成混合型的认知地图(hybrid cognitive map)。
图5
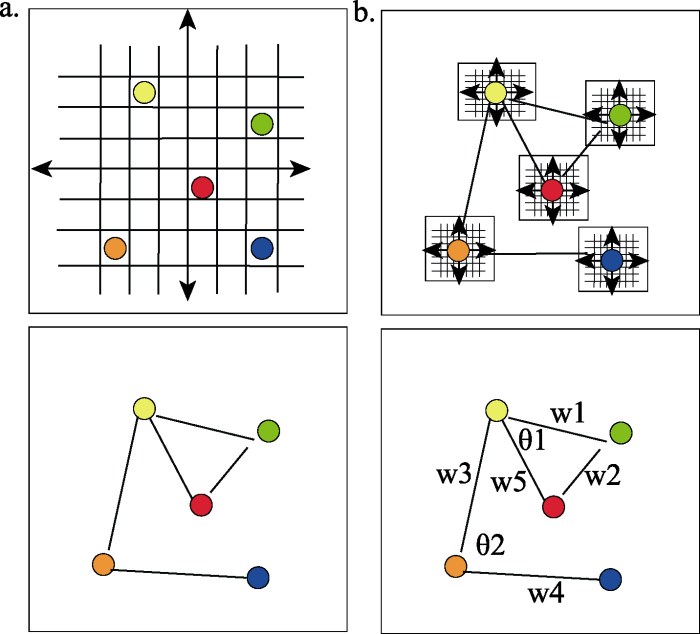
图5
a. 欧式地图(上)和拓扑图(下)的示意图; b. 参考框架网络理论(上)在每个局部区域都存在精确的欧式参考框架, 有标签图假设(下)在节点间辅以夹角信息和连接边权重。
参考框架网络理论放松了欧式地图的全局一致性这一严格约束, 因此在减轻记忆负载的同时也容许空间表征存在一定的误差和扭曲, 从而更加符合以往实际导航任务中人们的行为表现。但是在每一个局部区域都要精确地在度量性参考框架下表征信息仍旧很繁琐, 并且局部区域间的路径关系(如长度、方位夹角)似乎也十分不明确。Warren (2019)提出的有标签图假设在上述理论基础上进行了适度的简化和补充。
有标签图假设(labeled graph)没有过多关注局部区域内的精确表征, 而是在不同的局部区域节点之间辅以度量性信息, 以边的权重表示路径的大致长度, 以节点处的标签指示交叉点处毗邻路径间的大致夹角(图5b下)。与参考框架网络理论的共同点在于, 有标签图假设也无需在一个全局统一的参考框架内表征所有空间信息。
欧式地图和拓扑图对于空间表征都是必要的, 但具体建立和使用会依赖于环境特征和任务需求(Peer et al., 2021)。通过将度量信息限制在有限的局部, 一方面避免认知超载, 另一方面也能较好地为空间表征的不精确性或误差提供解释。这些融合假设对欧式地图和拓扑图二者的理论争议进行了折中, 确实能够更完善地解释已有的实验证据, 但是本质上并没有创新。
4.4 统一或整合假设
物理空间、抽象关系空间内的很多环境其潜在结构本质上是一样的, 只是具体的感觉刺激不同而已, 例如不同物理环境都符合欧式规则但环境内部的具体位置组织却不同、不同家庭的家谱都有相同的分支结构但具体的家庭成员却不同。如果能在内在结构相似但具体刺激不同的环境间泛化, 可以提高新环境下空间表征的效率。基于这个思路, Whittington等人(2020)提出TEM (Tolman- Eichenbaum Machine)模型作为统一框架来整合欧式地图和拓扑图这两种形式, 该模型的命名正是为了纪念分别与这两种表征形式有渊源的学者Tolman和Eichenbaum。
TEM的基本假设是环境或任务内在的抽象结构泛化能为空间表征和推理提供极大便利, 海马结构的空间记忆和关系记忆都遵循结构泛化这个共同原则, 具体包括结构抽象和特定的感觉信息绑定两个过程。结构泛化的关键在于因子化和重新组合, 即把不同方面的知识(如潜在结构和特定感觉刺激)分开表征形成独立因子, 以便后续面对新情境可以灵活重组。结构抽象的过程发生在内侧内嗅皮层, 抽象出的结构可以在不同的感觉刺激间泛化, 从而实现重映射(remapping); 特定的感觉刺激绑定则发生在海马。
经过基于上述原则的学习和训练后, TEM模拟的内嗅皮层确实表现出多种细胞的特性, 如网格细胞、边界细胞、物体向量细胞等; 而TEM模拟的海马细胞也表现出位置细胞的性质。这些TEM模拟细胞的活动模式能够很好地吻合物理空间和抽象空间的实验结果, 表明结构泛化的基本原则是有效的, 有可能是欧式地图和拓扑图共同的底层机制, 由此表明二者在心理表征上可能是一体两面的。
4.5 层级性理论
在上述欧式地图和拓扑图理论中, 认知地图所包含的不同位置都处于无差别的表征水平, 并没有高低隶属关系的区分, 然而正如上文“2.3 层级性”这部分提到的, 环境空间往往会存在嵌套结构, 因此在认知地图上不同区域的表征间可能具有层级性结构(hierarchical organization), 即环境的不同尺度范围或不同地理单元的信息是按层级加以表征的(赵民涛, 2006)。
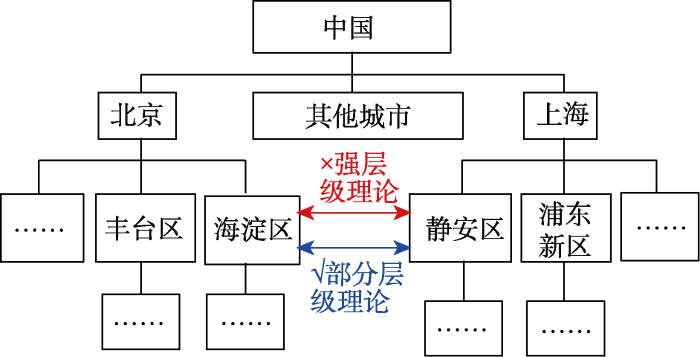
层级理论适用的环境一般具有相对较大的空间尺度或相对复杂的内部结构, 环境结构的复杂度可能由物理因素(如墙壁阻隔)或人文原因(如行政区划)导致, 而简单的小尺度空间一般并不具备明显的多区域分支结构(如单视点空间), 因此在这些空间类型中表征一般都并没有突出的层级性。根据空间关系在记忆中编码的类型可以将层级理论分成强层级理论和部分层级理论这两个子理论(McNamara, 1986)。
强层级理论(strongly hierarchical theory)认为处于同一层级不同分支上的位置之间不存在空间关系编码, 它们的空间关系必须从更高级的空间知识中推导得到(图6)。比如同一个省内的两个城市间的空间关系并不会被直接编码, 而是通过比较二者在该省内的各自位置来间接得到。强层级理论在空间知识的存储上更节约记忆资源, 但是很明显丧失了灵活性。
图6
5 研究展望
5.1 认知地图的层级性变化
认知地图的层级性会在空间环境具有嵌套结构时表现出来, 而欧式地图和拓扑图这两种形式都没有考虑层级性的问题。本研究推测, 层级性与空间尺度密切相关, 认知地图的层级性会在表征大尺度空间时出现, 而欧式表征和拓扑表征则存在于其中尺度相对较小的某一层级内, 但是由于认知地图的构建是动态的过程, 大尺度空间并非是一成不变的, 随着认知地图的逐步扩张, 最初的大尺度空间下不同区域的边界可能会逐渐重叠, 因此空间表征也相应地发生融合, 从而最初的大尺度空间表征所具有的层级性可能会在这个过程逐步减小甚至最终消失, 形成全局的均一认知地图, 同时包含欧式表征和拓扑表征两类信息, 并且建立起新的路径关系以连接原来隶属于不同上位等级的子区域(如图7)。
图7
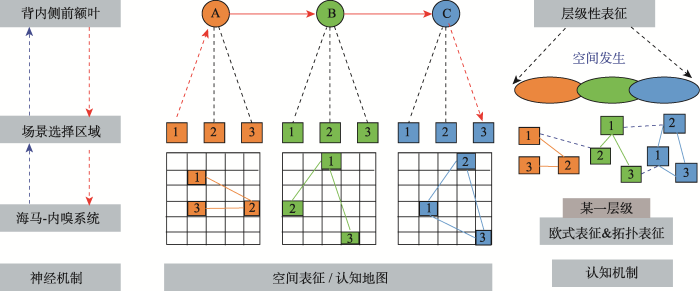
图7
认知地图的层级性变化假设。图中A, B和C代表位于上位等级的区域, 而各自之下树状分支的三个位置是它们的子区域, 同一上位等级区域内的不同子区域间(图中不同颜色的1, 2, 3)存在拓扑关系, 并且欧式位置信息也会被同时表征。随着认知地图的形成, 空间表征逐渐从局部扩展到全局, 相应负责的脑区也会变化(左侧蓝色虚线代表认知地图的形成, 红色虚线则表示调用认知地图进行导航规划的过程)。空间表征的层级性并非一成不变的, 可能会随着认知地图的逐步扩大, 而将不同区域的边界进行融合, 最终有可能所有位置表征之间的层级性会逐渐消失, 即形成图中A, B和C三个区域内9个位置的欧式表征和拓扑表征整合后的认知地图。彩图见电子版。
不过认知地图的扩张潜力是有限的, 因为人的空间认知资源是受限的, 所能构建的认知地图必然会存在尺度范围的上限, 不同个体的上限可能会存在差异。未来研究应当关注认知地图构建的动态过程中是否存在层级性下降的现象, 并且进一步探究人类认知地图的尺度限制, 此外欧式地图和拓扑图在认知地图发生的过程中如何实现整合、两种表征的能力是否存在关联也是值得研究的问题。
5.2 空间维度和范围的扩展
传统的空间表征研究所关注的主要是常规的二维物理空间, 由此导致多数研究者对空间表征的认识也是扁平化的(例如将二维地图与之类比)。随着导航认知领域的不断发展, 更多的创新范式涌现, 实验中的可导航空间也包含了更多新颖的形式。
一方面, 物理空间出现维度的拓展、曲率的操纵以及扭曲规则的设计。欧式空间的维度上, 从二维拓展到三维, 例如Kim和Doeller (2022)让被试采取紧贴地面移动或飞行等不同方式在由平面和弧面构成的三维空间中探索学习, 随后进行距离估计测试, 发现在能鸟瞰全局时(即直接暴露于环境的三维结构中)欧氏距离估计表现更好, 表明空间表征并非局限于二维平面, 而是会适应于行为经验和任务需求。此外, 在非欧空间如双曲空间或球面空间内, 被试完成指向任务时仍与欧式规则相匹配, 表明空间表征可能会将日常生活经验沿用到不同曲率的虚拟空间中(Widdowson & Wang, 2022)。然而, 当欧式空间发生扭曲(如存在“虫洞”, 可以在两个位置点间瞬时穿越)时, 被试却可能在没有察觉到这种扭曲的情况下产生行为偏差(Warren et al., 2017)。这些研究主要关注行为表现, 没有考察海马、内嗅等相关脑区在表征这些不常见的物理空间时发生了何种变化、与常规空间表征是否存在共同机制等, 未来有必要将这些创新的空间范式与神经测量手段结合起来。
另一方面, 空间知识开始在广义上指向抽象的认知空间, 包括社会关系空间、概念空间、价值空间和语义空间等, 而不再仅局限于物理空间(Schafer & Schiller, 2018)。空间隐喻在日常生活中十分常见, 比如社会等级和人际关系的很多描述其实与空间表达密切相关, 如“高”攀、“上”坐、疏“远”、亲“近”等。社会关系的感知反过来也会影响物理空间知识的表征, 更密切的关系会缩短主观表征的距离(Kerkman et al., 2004)。社会信息的编码类似于空间信息, 将每个社会个体表示为坐标, 根据特征或属性确立社会空间的评估维度(如权力、受欢迎度) (Park et al., 2020), 进而可以进行社会推导和决策。人类可以在抽象的特征空间中编码潜在的社会关系模式, 以灵活的方式构建社交网络(Son et al., 2021)。包括海马、楔前叶、背外侧前额叶和脑岛等多个脑区在内的脑网络共同参与社会空间中的导航(Zhang et al., 2022)。不过社会空间中的很多元素并不能很清楚地与物理空间进行一一对应, 比如一个社交场合的边界无法明确定义、人际关系空间中距离的度量维度没有上限, 未来研究还需要进一步厘清这些模糊点。
5.3 认知地图假说的局限性
Tversky (2005)曾提出容忍系统误差存在的认知拼贴画(cognitive collages)和简单环境下的空间心理模型(spatial mental models)来取代认知地图的比喻。近期Farzanfar等人(2023)进一步提出了空间图式(spatial schema)的概念, 他们假设有相似环境结构的导航经历会形成空间图式(如布局类似的城市)。具体而言, 环境空间信息的主旨和细节是分开表征的, 分别对应着空间概要和认知地图, 其中空间概要(spatial gist)是指特定环境的核心特征, 表征脑区是海马前部; 细节信息则在海马后部表征, 二者都是针对特定环境而言的。而空间图式则是更上位的空间表征, 从多个空间概要中提炼得到, 通过提取同类环境中可泛化的相似特征(如地理、视觉空间特征), 进而参与优化导航决策, 主要表征脑区是内侧前额叶。
认知地图的理论假设和早期证据都源于啮齿类动物行为学和电生理的研究成果, 但是人脑表征信息的方式不同于啮齿类, 这种差异贯穿了空间表征的各个方面, 包括对环境结构和子区域、路线、方向以及距离的表征(Zhao, 2018), 因此未来研究应当更多地关注人类自身的导航行为, 不宜直接进行跨物种的理论迁移。
5.4 结语
认知地图思想的哲学起源是康德关于空间表征本性的观点, 康德(1781/2004)在《纯粹理性批判》中提出空间表征是先于经验而存在的, 因此具有先天性。在康德的空间表征先天性理论和Tolman (1948)认知地图思想基础上, O’ Keefe和Nadel (1978)明确指出空间本性是绝对的, 因此认知地图是欧式地图, 其生理基础是海马中表征绝对位置的细胞(以及后续在内嗅皮层中发现的、为位置表征提供标度的网格细胞), 同时反对相对(或关系)空间理论。然而, 海马的功能并不局限在物理空间内, 而是参与广泛的记忆空间表征, 因此后续Eichenbaum等人(1999)提出记忆空间理论, 认知地图表征相对连接关系的拓扑图理论随后出现。
欧式地图和拓扑图这两种认知地图的可能存在形式都有其合理性和局限之处, 神经机制层面二者都在一定程度上得到了验证, 并且分别对认知地图的某些基本属性十分必要, 因此近期研究者们试图将二者组合或统一起来, 以更完整地描述认知地图。这些理论虽然兼顾欧式地图和拓扑图的特征, 但是却忽视了空间层级性在认知地图构建中的角色和影响。
嵌套空间表征的层级性在行为现象上多有发现, 并且早期也有研究者提出层级性理论, 但对于这类空间如何在大脑中表征的研究却十分稀少(Kim & Maguire, 2018), 在理论和实证研究上欧式地图和拓扑图都未与认知地图的层级性相联系。二者都有可能在嵌套的空间中被构建, 因此这可能并不是因为欧式地图和拓扑图都不具备层级性表征, 而是因为以往研究者所采用的研究范式更多地关注认知地图构建完毕后的特征, 而没有考察构建的动态过程。在通过学习构建认知地图的过程中, 层级性可能会逐步下降, 未来研究需要进一步探索和检验这个推测。
此外, 认知地图的研究动态也提示, 未来还需要关注空间维度和范围的扩展, 比较社会空间、语义空间与传统研究的物理空间中认知地图的差别和共性。多种行为、建模和神经现象揭示认知地图具有选择性、扭曲性和灵活性等基本属性, 未来需要在这些属性的基础上进一步完善理论建构, 反思认知地图假说可能存在的局限性。
参考文献
认知地图的地理学研究进展与展望
DOI:10.18306/dlkxjz.2022.01.007
[本文引用: 1]

认知地图作为人对人地关系复杂系统进行抽象化和秩序化的内在表征,是个体空间行为决策、空间认知与空间规划的理论基础,也是地理学的重要研究领域之一。论文通过CiteSpace文献学分析方法并结合经典文献回顾,从多学科视角系统梳理认知地图1948—2020年共70余年的发展脉络与研究热点。研究认为,认知地图在地理学的学科发展过程中扮演了重要角色,特别是在认知空间与城市意象、空间扭曲与空间偏好、空间知识与决策行为等方面丰富了地理学内涵。近期与地理学有关的认知地图跨学科研究出现3大转向:大数据时代重新定义认知空间与城市意象的数字转向,以特定群体或事件的空间偏好为切入点的情感转向,以第一人称视角解译空间知识与决策行为的神经转向。最后指出认知地图空间分析的地理学在跨学科融合发展中的角色与应用前景。
物体位置与空间关系的心理表征
外界环境中物体位置与空间关系在记忆中如何表征,一直是空间认知研究领域探讨和争论的热点问题。该文从空间表征的参照框架、朝向特异性、组织结构和存储内容四个方面,系统回顾了近年来对空间表征形成机制与内在特征的理论探讨。在此基础上,进一步讨论了当前空间表征研究中存在的生态效度问题,以及以后将虚拟环境技术引入到空间认知研究中的发展趋势
Place cells in the hippocampus:Eleven maps for eleven rooms
Neural signatures of reinforcement learning correlate with strategy adoption during spatial navigation
Styles and methods of structuring a city
DOI:10.1177/001391657000200106 URL [本文引用: 1]
Discovering event structure in continuous narrative perception and memory
DOI:S0896-6273(17)30593-7
PMID:28772125
[本文引用: 1]
During realistic, continuous perception, humans automatically segment experiences into discrete events. Using a novel model of cortical event dynamics, we investigate how cortical structures generate event representations during narrative perception and how these events are stored to and retrieved from memory. Our data-driven approach allows us to detect event boundaries as shifts between stable patterns of brain activity without relying on stimulus annotations and reveals a nested hierarchy from short events in sensory regions to long events in high-order areas (including angular gyrus and posterior medial cortex), which represent abstract, multimodal situation models. High-order event boundaries are coupled to increases in hippocampal activity, which predict pattern reinstatement during later free recall. These areas also show evidence of anticipatory reinstatement as subjects listen to a familiar narrative. Based on these results, we propose that brain activity is naturally structured into nested events, which form the basis of long-term memory representations.Copyright © 2017 Elsevier Inc. All rights reserved.
Foundations of multidimensional scaling
Deforming the metric of cognitive maps distorts memory
DOI:10.1038/s41562-019-0767-3
PMID:31740749
[本文引用: 1]
Environmental boundaries anchor cognitive maps that support memory. However, trapezoidal boundary geometry distorts the regular firing patterns of entorhinal grid cells, proposedly providing a metric for cognitive maps. Here we test the impact of trapezoidal boundary geometry on human spatial memory using immersive virtual reality. Consistent with reduced regularity of grid patterns in rodents and a grid-cell model based on the eigenvectors of the successor representation, human positional memory was degraded in a trapezoid environment compared with a square environment-an effect that was particularly pronounced in the narrow part of the trapezoid. Congruent with changes in the spatial frequency of eigenvector grid patterns, distance estimates between remembered positions were persistently biased, revealing distorted memory maps that explained behaviour better than the objective maps. Our findings demonstrate that environmental geometry affects human spatial memory in a similar manner to rodent grid-cell activity and, therefore, strengthen the putative link between grid cells and behaviour along with their cognitive functions beyond navigation.
Grid-cell representations in mental simulation
DOI:10.7554/eLife.17089
URL
[本文引用: 1]
Anticipating the future is a key motif of the brain, possibly supported by mental simulation of upcoming events. Rodent single-cell recordings suggest the ability of spatially tuned cells to represent subsequent locations. Grid-like representations have been observed in the human entorhinal cortex during virtual and imagined navigation. However, hitherto it remains unknown if grid-like representations contribute to mental simulation in the absence of imagined movement. Participants imagined directions between building locations in a large-scale virtual-reality city while undergoing fMRI without re-exposure to the environment. Using multi-voxel pattern analysis, we provide evidence for representations of absolute imagined direction at a resolution of 30° in the parahippocampal gyrus, consistent with the head-direction system. Furthermore, we capitalize on the six-fold rotational symmetry of grid-cell firing to demonstrate a 60° periodic pattern-similarity structure in the entorhinal cortex. Our findings imply a role of the entorhinal grid-system in mental simulation and future thinking beyond spatial navigation.
Stress disrupts human hippocampal-prefrontal function during prospective spatial navigation and hinders flexible behavior
DOI:S0960-9822(20)30342-0
PMID:32243859
[本文引用: 1]
The ability to anticipate and flexibly plan for the future is critical for achieving goal-directed outcomes. Extant data suggest that neural and cognitive stress mechanisms may disrupt memory retrieval and restrict prospective planning, with deleterious impacts on behavior. Here, we examined whether and how acute psychological stress influences goal-directed navigational planning and efficient, flexible behavior. Our methods combined fMRI, neuroendocrinology, and machine learning with a virtual navigation planning task. Human participants were trained to navigate familiar paths in virtual environments and then (concurrent with fMRI) performed a planning and navigation task that could be most efficiently solved by taking novel shortcut paths. Strikingly, relative to non-stressed control participants, participants who performed the planning task under experimentally induced acute psychological stress demonstrated (1) disrupted neural activity critical for mnemonic retrieval and mental simulation and (2) reduced traversal of shortcuts and greater reliance on familiar paths. These neural and behavioral changes under psychological stress were tied to evidence for disrupted neural replay of memory for future locations in the spatial environment, providing mechanistic insight into why and how stress can alter planning and foster inefficient behavior.Copyright © 2020 Elsevier Inc. All rights reserved.
Cooperative interactions between hippocampal and striatal systems support flexible navigation
DOI:10.1016/j.neuroimage.2012.01.046
PMID:22266411
[本文引用: 1]
Research in animals and humans has demonstrated that the hippocampus is critical for retrieving distinct representations of overlapping sequences of information. There is recent evidence that the caudate nucleus and orbitofrontal cortex are also involved in disambiguation of overlapping spatial representations. The hippocampus and caudate are functionally distinct regions, but both have anatomical links with the orbitofrontal cortex. The present study used an fMRI-based functional connectivity analysis in humans to examine the functional relationship between the hippocampus, caudate, and orbitofrontal cortex when participants use contextual information to navigate well-learned spatial routes which share common elements. Participants were trained outside the scanner to navigate virtual mazes from a first-person perspective. Overlapping condition mazes began and ended at distinct locations, but converged in the middle to share some hallways with another maze. Non-overlapping condition mazes did not share any hallways with any other maze. Successful navigation through the overlapping hallways required contextual information identifying the current navigational route to guide the appropriate response for a given trial. Results revealed greater functional connectivity between the hippocampus, caudate, and orbitofrontal cortex for overlapping mazes compared to non-overlapping mazes. The current findings suggest that the hippocampus and caudate interact with prefrontal structures cooperatively for successful contextually dependent navigation.Copyright © 2012 Elsevier Inc. All rights reserved.
Multiple scales of representation along the hippocampal anteroposterior axis in humans
DOI:S0960-9822(18)30618-3
PMID:29937352
[本文引用: 1]
The ability to represent the world accurately relies on simultaneous coarse and fine-grained neural information coding, capturing both gist and detail of an experience. The longitudinal axis of the hippocampus may provide a gradient of representational granularity in spatial and episodic memory in rodents and humans [1-8]. Rodent place cells in the ventral hippocampus exhibit significantly larger place fields and greater autocorrelation than those in the dorsal hippocampus [1, 9-11], which may underlie a coarser and slower changing representation of space [10, 12]. Recent evidence suggests that properties of cellular dynamics in rodents can be captured with fMRI in humans during spatial navigation [13] and conceptual learning [14]. Similarly, mechanisms supporting granularity along the long axis may also be extrapolated to the scale of fMRI signal. Here, we provide the first evidence for separable scales of representation along the human hippocampal anteroposterior axis during navigation and rest by showing (1) greater similarity among voxel time courses and (2) higher temporal autocorrelation in anterior hippocampus (aHPC), relative to posterior hippocampus (pHPC), the human homologs of ventral and dorsal rodent hippocampus. aHPC voxels exhibited more similar activity at each time point and slower signal change over time than voxels in pHPC, consistent with place field organization in rodents. Importantly, similarity between voxels was related to navigational strategy and episodic memory. These findings provide evidence that the human hippocampus supports an anterior-to-posterior gradient of coarse-to-fine spatiotemporal representations, suggesting the existence of a cross-species mechanism, whereby lower neural similarity supports more complex coding of experience.Copyright © 2018 Elsevier Ltd. All rights reserved.
Predictive representations in hippocampal and prefrontal hierarchies
DOI:10.1523/JNEUROSCI.1327-21.2021
URL
[本文引用: 1]
As we navigate the world, we use learned representations of relational structures to explore and to reach goals. Studies of how relational knowledge enables inference and planning are typically conducted in controlled small-scale settings. It remains unclear, however, how people use stored knowledge in continuously unfolding navigation (e.g., walking long distances in a city). We hypothesized that multiscale predictive representations guide naturalistic navigation in humans, and these scales are organized along posterior-anterior prefrontal and hippocampal hierarchies. We conducted model-based representational similarity analyses of neuroimaging data collected while male and female participants navigated realistically long paths in virtual reality. We tested the pattern similarity of each point, along each path, to a weighted sum of its successor points within predictive horizons of different scales. We found that anterior PFC showed the largest predictive horizons, posterior hippocampus the smallest, with the anterior hippocampus and orbitofrontal regions in between. Our findings offer novel insights into how cognitive maps support hierarchical planning at multiple scales.
Asymmetries in distance cognition
DOI:10.1111/gean.1979.11.issue-4 URL [本文引用: 1]
Memory for urban geography
DOI:10.1080/14640747908400714
URL
[本文引用: 2]
Consistent patterns of errors are found in estimations of distances and angles along urban routes, even among subjects who know the areas well. These patterns can be used to discover the organization of the knowledge we use to find our way around in everyday life.
Grid cells form a global representation of connected environments
DOI:10.1016/j.cub.2015.02.037
PMID:25913404
[本文引用: 1]
The firing patterns of grid cells in medial entorhinal cortex (mEC) and associated brain areas form triangular arrays that tessellate the environment [1, 2] and maintain constant spatial offsets to each other between environments [3, 4]. These cells are thought to provide an efficient metric for navigation in large-scale space [5-8]. However, an accurate and universal metric requires grid cell firing patterns to uniformly cover the space to be navigated, in contrast to recent demonstrations that environmental features such as boundaries can distort [9-11] and fragment [12] grid patterns. To establish whether grid firing is determined by local environmental cues, or provides a coherent global representation, we recorded mEC grid cells in rats foraging in an environment containing two perceptually identical compartments connected via a corridor. During initial exposures to the multicompartment environment, grid firing patterns were dominated by local environmental cues, replicating between the two compartments. However, with prolonged experience, grid cell firing patterns formed a single, continuous representation that spanned both compartments. Thus, we provide the first evidence that in a complex environment, grid cell firing can form the coherent global pattern necessary for them to act as a metric capable of supporting large-scale spatial navigation.Copyright © 2015 The Authors. Published by Elsevier Ltd.. All rights reserved.
Bias in human path integration is predicted by properties of grid cells
DOI:10.1016/j.cub.2015.05.031
PMID:26073138
[本文引用: 1]
Accurate wayfinding is essential to the survival of many animal species and requires the ability to maintain spatial orientation during locomotion. One of the ways that humans and other animals stay spatially oriented is through path integration, which operates by integrating self-motion cues over time, providing information about total displacement from a starting point. The neural substrate of path integration in mammals may exist in grid cells, which are found in dorsomedial entorhinal cortex and presubiculum and parasubiculum in rats. Grid cells have also been found in mice, bats, and monkeys, and signatures of grid cell activity have been observed in humans. We demonstrate that distance estimation by humans during path integration is sensitive to geometric deformations of a familiar environment and show that patterns of path integration error are predicted qualitatively by a model in which locations in the environment are represented in the brain as phases of arrays of grid cells with unique periods and decoded by the inverse mapping from phases to locations. The periods of these grid networks are assumed to expand and contract in response to expansions and contractions of a familiar environment. Biases in distance estimation occur when the periods of the encoding and decoding grids differ. Our findings explicate the way in which grid cells could function in human path integration.Copyright © 2015 Elsevier Ltd. All rights reserved.
The role of the lateral orbitofrontal cortex in creating cognitive maps
DOI:10.1038/s41593-022-01216-0
PMID:36550290
[本文引用: 1]
We use mental models of the world-cognitive maps-to guide behavior. The lateral orbitofrontal cortex (lOFC) is typically thought to support behavior by deploying these maps to simulate outcomes, but recent evidence suggests that it may instead support behavior by underlying map creation. We tested between these two alternatives using outcome-specific devaluation and a high-potency chemogenetic approach. Selectively inactivating lOFC principal neurons when male rats learned distinct cue-outcome associations, but before outcome devaluation, disrupted subsequent inference, confirming a role for the lOFC in creating new maps. However, lOFC inactivation surprisingly led to generalized devaluation, a result that is inconsistent with a complete mapping failure. Using a reinforcement learning framework, we show that this effect is best explained by a circumscribed deficit in credit assignment precision during map construction, suggesting that the lOFC has a selective role in defining the specificity of associations that comprise cognitive maps.© 2022. This is a U.S. Government work and not under copyright protection in the US; foreign copyright protection may apply.
Entropy of city street networks linked to future spatial navigation ability
DOI:10.1038/s41586-022-04486-7 [本文引用: 1]
Reconceiving the hippocampal map as a topological template
DOI:10.7554/eLife.03476
URL
[本文引用: 2]
The role of the hippocampus in spatial cognition is incontrovertible yet controversial. Place cells, initially thought to be location-specifiers, turn out to respond promiscuously to a wide range of stimuli. Here we test the idea, which we have recently demonstrated in a computational model, that the hippocampal place cells may ultimately be interested in a space's topological qualities (its connectivity) more than its geometry (distances and angles); such higher-order functioning would be more consistent with other known hippocampal functions. We recorded place cell activity in rats exploring morphing linear tracks that allowed us to dissociate the geometry of the track from its topology. The resulting place fields preserved the relative sequence of places visited along the track but did not vary with the metrical features of the track or the direction of the rat's movement. These results suggest a reinterpretation of previous studies and new directions for future experiments.
Habitual use of GPS negatively impacts spatial memory during self-guided navigation
Predictive maps in rats and humans for spatial navigation
DOI:10.1016/j.cub.2022.06.090 URL [本文引用: 1]
Three cortical scene systems and their development
DOI:10.1016/j.tics.2021.11.002 URL [本文引用: 1]
Evidence for grid cells in a human memory network
DOI:10.1038/nature08704 [本文引用: 2]
Declarative memory: Insights from cognitive neurobiology
DOI:10.1146/psych.1997.48.issue-1 URL [本文引用: 1]
The hippocampus, memory, and place cells: Is it spatial memory or a memory space?
DOI:10.1016/s0896-6273(00)80773-4 PMID:10399928 [本文引用: 4]
Where am I now? Distinct roles for parahippocampal and retrosplenial cortices in place recognition
DOI:10.1523/JNEUROSCI.0799-07.2007
PMID:17553986
[本文引用: 1]
A key component of spatial navigation is the ability to use visual information to ascertain where one is located and how one is oriented in the world. We used functional magnetic resonance imaging to examine the neural correlates of this phenomenon in humans. Subjects were scanned while retrieving different kinds of topographical and nontopographical information in response to visual scenes. In the three critical conditions, they viewed images of a familiar college campus, and reported either the location of the place depicted in the image (location task), the compass direction that the camera was facing when the image was taken (orientation task), or whether the location was on campus or not (familiarity task). Our analyses focused on the retrosplenial cortex (RSC)/parietal-occipital sulcus region and the parahippocampal place area (PPA), which previous studies indicate play a critical role in place recognition. RSC activity depended on the type of information retrieved, with the strongest response in the location task. In contrast, PPA activity did not depend on the retrieval task. Additional analyses revealed a strong effect of familiarity in RSC but not in the PPA, with the former region responding much more strongly to images of the familiar campus than to images of an unfamiliar campus. These results suggest that the PPA and RSC play distinct but complementary roles in place recognition. In particular, the PPA may primarily support perception of the immediate scene, whereas RSC may support memory retrieval mechanisms that allow the scene to be localized within the broader spatial environment.
The cognitive map in humans: Spatial navigation and beyond
DOI:10.1038/nn.4656
PMID:29073650
[本文引用: 1]
The 'cognitive map' hypothesis proposes that brain builds a unified representation of the spatial environment to support memory and guide future action. Forty years of electrophysiological research in rodents suggest that cognitive maps are neurally instantiated by place, grid, border and head direction cells in the hippocampal formation and related structures. Here we review recent work that suggests a similar functional organization in the human brain and yields insights into how cognitive maps are used during spatial navigation. Specifically, these studies indicate that (i) the human hippocampus and entorhinal cortex support map-like spatial codes, (ii) posterior brain regions such as parahippocampal and retrosplenial cortices provide critical inputs that allow cognitive maps to be anchored to fixed environmental landmarks, and (iii) hippocampal and entorhinal spatial codes are used in conjunction with frontal lobe mechanisms to plan routes during navigation. We also discuss how these three basic elements of cognitive map based navigation-spatial coding, landmark anchoring and route planning-might be applied to nonspatial domains to provide the building blocks for many core elements of human thought.
Mental replays enable flexible navigation
DOI:10.1038/d41586-022-01035-0 [本文引用: 1]
The anterior hippocampus supports a coarse, global environmental representation and the posterior hippocampus supports fine-grained, local environmental representations
DOI:10.1162/jocn_a_00436
PMID:23806136
[本文引用: 1]
Representing an environment globally, in a coarse way, and locally, in a fine-grained way, are two fundamental aspects of how our brain interprets the world that surrounds us. The neural correlates of these representations have not been explicated in humans. In this study we used fMRI to investigate these correlates and to explore a possible functional segregation in the hippocampus and parietal cortex. We hypothesized that processing a coarse, global environmental representation engages anterior parts of these regions, whereas processing fine-grained, local environmental information engages posterior parts. Participants learned a virtual environment and then had to find their way during fMRI. After scanning, we assessed strategies used and representations stored. Activation in the hippocampal head (anterior) was related to the multiple distance and global direction judgments and to the use of a coarse, global environmental representation during navigation. Activation in the hippocampal tail (posterior) was related to both local and global direction judgments and to using strategies like number of turns. A structural shape analysis showed that the use of a coarse, global environmental representation was related to larger right hippocampal head volume and smaller right hippocampal tail volume. In the inferior parietal cortex, a similar functional segregation was observed, with global routes represented anteriorly and fine-grained route information such as number of turns represented posteriorly. In conclusion, moving from the anterior to the posterior hippocampus and inferior parietal cortex reflects a shift from processing coarse global environmental representations to processing fine-grained, local environmental representations.
From cognitive maps to spatial schemas
DOI:10.1038/s41583-022-00655-9 [本文引用: 1]
Striatal and hippocampal contributions to flexible navigation in rats and humans
Hippocampal spatio-predictive cognitive maps adaptively guide reward generalization
DOI:10.1038/s41593-023-01283-x
[本文引用: 1]
The brain forms cognitive maps of relational knowledge—an organizing principle thought to underlie our ability to generalize and make inferences. However, how can a relevant map be selected in situations where a stimulus is embedded in multiple relational structures? Here, we find that both spatial and predictive cognitive maps influence generalization in a choice task, where spatial location determines reward magnitude. Mirroring behavior, the hippocampus not only builds a map of spatial relationships but also encodes the experienced transition structure. As the task progresses, participants’ choices become more influenced by spatial relationships, reflected in a strengthening of the spatial map and a weakening of the predictive map. This change is driven by orbitofrontal cortex, which represents the degree to which an outcome is consistent with the spatial rather than the predictive map and updates hippocampal representations accordingly. Taken together, this demonstrates how hippocampal cognitive maps are used and updated flexibly for inference.
Spatial representations without spatial computations
DOI:10.1177/09567976221094863
PMID:36201754
[本文引用: 1]
Cognitive maps are assumed to be fundamentally spatial and grounded only in perceptual processes, as supported by the discovery of functionally dedicated cell types in the human brain, which tile the environment in a maplike fashion. Challenging this view, we demonstrate that spatial representations-such as large-scale geographical maps-can be as well retrieved with high confidence from natural language through cognitively plausible artificial-intelligence models on the basis of nonspatial associative-learning mechanisms. More critically, we show that linguistic information accounts for the specific distortions observed in tasks when college-age adults have to judge the geographical positions of cities, even when these positions are estimated on real maps. These findings indicate that language experience can encode and reproduce cognitive maps without the need for a dedicated spatial-representation system, thus suggesting that the formation of these maps is the result of a strict interplay between spatial- and nonspatial-learning principles.
Neuroethology of bat navigation
Mother bats facilitate pup navigation learning
DOI:10.1016/j.cub.2021.11.010 URL [本文引用: 1]
Integrating route knowledge in an unfamiliar neighborhood: Along and across route experiments
DOI:10.1016/S0272-4944(05)80252-X URL [本文引用: 1]
Microstructure of a spatial map in the entorhinal cortex
DOI:10.1038/nature03721 [本文引用: 4]
The ontogeny of a mammalian cognitive map in the real world
DOI:10.1126/science.aay3354
PMID:32647001
[本文引用: 1]
How animals navigate over large-scale environments remains a riddle. Specifically, it is debated whether animals have cognitive maps. The hallmark of map-based navigation is the ability to perform shortcuts, i.e., to move in direct but novel routes. When tracking an animal in the wild, it is extremely difficult to determine whether a movement is truly novel because the animal's past movement is unknown. We overcame this difficulty by continuously tracking wild fruit bat pups from their very first flight outdoors and over the first months of their lives. Bats performed truly original shortcuts, supporting the hypothesis that they can perform large-scale map-based navigation. We documented how young pups developed their visual-based map, exemplifying the importance of exploration and demonstrating interindividual differences.Copyright © 2020 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works.
Rapid invariant encoding of scene layout in human OPA.
DOI:S0896-6273(19)30349-6
PMID:31097360
[本文引用: 1]
Successful visual navigation requires a sense of the geometry of the local environment. How do our brains extract this information from retinal images? Here we visually presented scenes with all possible combinations of five scene-bounding elements (left, right, and back walls; ceiling; floor) to human subjects during functional magnetic resonance imaging (fMRI) and magnetoencephalography (MEG). The fMRI response patterns in the scene-responsive occipital place area (OPA) reflected scene layout with invariance to changes in surface texture. This result contrasted sharply with the primary visual cortex (V1), which reflected low-level image features of the stimuli, and the parahippocampal place area (PPA), which showed better texture than layout decoding. MEG indicated that the texture-invariant scene layout representation is computed from visual input within ∼100 ms, suggesting a rapid computational mechanism. Taken together, these results suggest that the cortical representation underlying our instant sense of the environmental geometry is located in the OPA.Copyright © 2019 Elsevier Inc. All rights reserved.
Evidence of hierarchies in cognitive maps
DOI:10.3758/BF03197683 URL [本文引用: 1]
People construct simplified mental representations to plan
DOI:10.1038/s41586-022-04743-9 [本文引用: 1]
The hippocampus and entorhinal cortex encode the path and Euclidean distances to goals during navigation
DOI:S0960-9822(14)00526-0
PMID:24909328
[本文引用: 1]
Despite decades of research on spatial memory, we know surprisingly little about how the brain guides navigation to goals. While some models argue that vectors are represented for navigational guidance, other models postulate that the future path is computed. Although the hippocampal formation has been implicated in processing spatial goal information, it remains unclear whether this region processes path- or vector-related information.We report neuroimaging data collected from subjects navigating London's Soho district; these data reveal that both the path distance and the Euclidean distance to the goal are encoded by the medial temporal lobe during navigation. While activity in the posterior hippocampus was sensitive to the distance along the path, activity in the entorhinal cortex was correlated with the Euclidean distance component of a vector to the goal. During travel periods, posterior hippocampal activity increased as the path to the goal became longer, but at decision points, activity in this region increased as the path to the goal became closer and more direct. Importantly, sensitivity to the distance was abolished in these brain areas when travel was guided by external cues.The results indicate that the hippocampal formation contains representations of both the Euclidean distance and the path distance to goals during navigation. These findings argue that the hippocampal formation houses a flexible guidance system that changes how it represents distance to the goal depending on the fluctuating demands of navigation.Copyright © 2014 The Authors. Published by Elsevier Inc. All rights reserved.
Direct recordings of grid-like neuronal activity in human spatial navigation
DOI:10.1038/nn.3466
PMID:23912946
[本文引用: 1]
Grid cells in the entorhinal cortex appear to represent spatial location via a triangular coordinate system. Such cells, which have been identified in rats, bats and monkeys, are believed to support a wide range of spatial behaviors. Recording neuronal activity from neurosurgical patients performing a virtual-navigation task, we identified cells exhibiting grid-like spiking patterns in the human brain, suggesting that humans and simpler animals rely on homologous spatial-coding schemes.
Unpacking the cognitive map: The parallel map theory of hippocampal function
In the parallel map theory, the hippocampus encodes space with 2 mapping systems. The bearing map is constructed primarily in the dentate gyrus from directional cues such as stimulus gradients. The sketch map is constructed within the hippocampus proper from positional cues. The integrated map emerges when data from the bearing and sketch maps are combined. Because the component maps work in parallel, the impairment of one can reveal residual learning by the other. Such parallel function may explain paradoxes of spatial learning, such as learning after partial hippocampal lesions, taxonomic and sex differences in spatial learning, and the function of hippocampal neurogenesis. By integrating evidence from physiology to phylogeny, the parallel map theory offers a unified explanation for hippocampal function.
Hippocampal and prefrontal processing of network topology to simulate the future
Prefrontal dynamics associated with efficient detours and shortcuts: A combined functional magnetic resonance imaging and magnetoencenphalography study
DOI:10.1162/jocn_a_01414
URL
[本文引用: 2]
Central to the concept of the “cognitive map” is that it confers behavioral flexibility, allowing animals to take efficient detours, exploit shortcuts, and avoid alluring, but unhelpful, paths. The neural underpinnings of such naturalistic and flexible behavior remain unclear. In two neuroimaging experiments, we tested human participants on their ability to navigate to a set of goal locations in a virtual desert island riven by lava, which occasionally spread to block selected paths (necessitating detours) or receded to open new paths (affording real shortcuts or false shortcuts to be avoided). Detours activated a network of frontal regions compared with shortcuts. Activity in the right dorsolateral PFC specifically increased when participants encountered tempting false shortcuts that led along suboptimal paths that needed to be differentiated from real shortcuts. We also report modulation in event-related fields and theta power in these situations, providing insight to the temporal evolution of response to encountering detours and shortcuts. These results help inform current models as to how the brain supports navigation and planning in dynamic environments.
The occipital place area is causally involved in representing environmental boundaries during navigation
DOI:10.1016/j.cub.2016.02.066
PMID:27020742
[本文引用: 1]
Thirty years of research suggests that environmental boundaries-e.g., the walls of an experimental chamber or room-exert powerful influence on navigational behavior, often to the exclusion of other cues [1-9]. Consistent with this behavioral work, neurons in brain structures that instantiate spatial memory often exhibit firing fields that are strongly controlled by environmental boundaries [10-15]. Despite the clear importance of environmental boundaries for spatial coding, however, a brain region that mediates the perception of boundary information has not yet been identified. We hypothesized that the occipital place area (OPA), a scene-selective region located near the transverse occipital sulcus [16], might provide this perceptual source by extracting boundary information from visual scenes during navigation. To test this idea, we used transcranial magnetic stimulation (TMS) to interrupt processing in the OPA while subjects performed a virtual-reality memory task that required them to learn the spatial locations of test objects that were either fixed in place relative to the boundary of the environment or moved in tandem with a landmark object. Consistent with our prediction, we found that TMS to the right OPA impaired spatial memory for boundary-tethered, but not landmark-tethered, objects. Moreover, this effect was found when the boundary was defined by a wall, but not when it was defined by a marking on the ground. These results show that the OPA is causally involved in boundary-based spatial navigation and suggest that the OPA is the perceptual source of the boundary information that controls navigational behavior.Copyright © 2016 Elsevier Ltd. All rights reserved.
The detour paradigm in animal cognition
DOI:10.1007/s10071-017-1152-0
PMID:29234898
[本文引用: 1]
In this paper, we review one of the oldest paradigms used in animal cognition: the detour paradigm. The paradigm presents the subject with a situation where a direct route to the goal is blocked and a detour must be made to reach it. Often being an ecologically valid and a versatile tool, the detour paradigm has been used to study diverse cognitive skills like insight, social learning, inhibitory control and route planning. Due to the relative ease of administrating detour tasks, the paradigm has lately been used in large-scale comparative studies in order to investigate the evolution of inhibitory control. Here we review the detour paradigm and some of its cognitive requirements, we identify various ecological and contextual factors that might affect detour performance, we also discuss developmental and neurological underpinnings of detour behaviors, and we suggest some methodological approaches to make species comparisons more robust.
Replay of behavioral sequences in the medial prefrontal cortex during rule switching
DOI:S0896-6273(20)30041-6
PMID:32032512
[本文引用: 1]
Temporally organized reactivation of experiences during awake immobility periods is thought to underlie cognitive processes like planning and evaluation. While replay of trajectories is well established for the hippocampus, it is unclear whether the medial prefrontal cortex (mPFC) can reactivate sequential behavioral experiences in the awake state to support task execution. We simultaneously recorded from hippocampal and mPFC principal neurons in rats performing a mPFC-dependent rule-switching task on a plus maze. We found that mPFC neuronal activity encoded relative positions between the start and goal. During awake immobility periods, the mPFC replayed temporally organized sequences of these generalized positions, resembling entire spatial trajectories. The occurrence of mPFC trajectory replay positively correlated with rule-switching performance. However, hippocampal and mPFC trajectory replay occurred independently, indicating different functions. These results demonstrate that the mPFC can replay ordered activity patterns representing generalized locations and suggest that mPFC replay might have a role in flexible behavior. VIDEO ABSTRACT.Copyright © 2020 Elsevier Inc. All rights reserved.
Social attitudes predict biases in geographic knowledge
DOI:10.1111/j.0033-0124.2004.05602009.x URL [本文引用: 1]
Adaptive cognitive maps for curved surfaces in the 3D world
DOI:10.1016/j.cognition.2022.105126 URL [本文引用: 1]
Hippocampus, retrosplenial and parahippocampal cortices encode multicompartment 3D space in a hierarchical manner
DOI:10.1093/cercor/bhy054 URL [本文引用: 2]
Effect of excitotoxic lesions of rat medial prefrontal cortex on spatial memory
The involvement of medial prefrontal cortex (mPFC) in spatial learning was examined in two memory tasks using spatial components, the Morris water maze and the three-panel runway. Using the Morris water maze task, with an invisible platform, the effects of NMDA mPFC lesions were assessed in a procedure reflecting spatial learning and memory, including a spatial reversal. In the three-panel runway, a delayed matching-to-position procedure was used in which rats were required to find food at the end of the runway after passing through one of three panel gates set into four barriers spaced equally apart along the maze. In addition, mPFC lesions were assessed behaviorally in two behavioral tests known to be sensitive to mPFC dysfunction: the food hoarding paradigm and spontaneous locomotion in the open field. Consistent with the documented effects of mPFC damage, NMDA mPFC lesions impaired food hoarding behavior and increased spontaneous exploratory locomotion. In the Morris water maze and the three-panel runway, mPFC-lesioned rats showed relatively few effects, supporting the conclusion that the damage inflicted to the mPFC had no consequence for the processing of spatial information. However, mPFC lesioned animals showed slower acquisition during both the training trial in the three-panel runway and the reversal training in the Morris water maze. These results suggest that spatial memory did not depend on mPFC integrity in the Morris water maze and the three-panel runway experiments, and address the issue of deficits induced by mPFC lesions in memory tasks dependent on non-mnemonic processes such as attentional processes and/or a reduced behavioral flexibility to environmental changes.
Boundary vector cells in the subiculum of the hippocampal formation
DOI:10.1523/JNEUROSCI.1319-09.2009
PMID:19657030
[本文引用: 1]
"Boundary vector cells" were predicted to exist by computational models of the environmental inputs underlying the spatial firing patterns of hippocampal place cells (O'Keefe and Burgess, 1996; Burgess et al., 2000; Hartley et al., 2000). Here, we report the existence of cells fulfilling this description in recordings from the subiculum of freely moving rats. These cells may contribute environmental information to place cell firing, complementing path integrative information. Their relationship to other cell types, including medial entorhinal "border cells," is discussed.
Dynamic causal modelling of hierarchical planning
DOI:10.1016/j.neuroimage.2022.119384 URL [本文引用: 1]
Distortion of mental body representations
DOI:10.1016/j.tics.2021.11.005
PMID:34952785
[本文引用: 2]
Our body is central to our sense of self, and distorted body representations are found in several serious medical conditions. This paper reviews evidence that distortions of body representations are also common in healthy individuals, and occur in domains including tactile spatial perception, proprioception, and the conscious body image. Across domains, there is a general tendency for body width to be overestimated compared to body length. Intriguingly, distortions in both eating disorders and chronic pain appear to be exaggerations of this baseline pattern of distortions, suggesting that these conditions may relate to dysfunction of mechanisms for body perception. Distortions of body representations provide a revealing window into basic aspects of self-perception.Copyright © 2021 Elsevier Ltd. All rights reserved.
Causal role of a neural system for separating and selecting multidimensional social cognitive information
DOI:10.1016/j.neuron.2022.12.030 URL [本文引用: 1]
Embodied spatial cognition: Biological and artificial systems
DOI:10.1016/j.imavis.2008.09.001 URL [本文引用: 1]
Outside looking in: landmark generalization in the human navigational system
DOI:10.1523/JNEUROSCI.2270-15.2015
PMID:26538658
[本文引用: 1]
The use of landmarks is central to many navigational strategies. Here we use multivoxel pattern analysis of fMRI data to understand how landmarks are coded in the human brain. Subjects were scanned while viewing the interiors and exteriors of campus buildings. Despite their visual dissimilarity, interiors and exteriors corresponding to the same building elicited similar activity patterns in the parahippocampal place area (PPA), retrosplenial complex (RSC), and occipital place area (OPA), three regions known to respond strongly to scenes and buildings. Generalization across stimuli depended on knowing the correspondences among them in the PPA but not in the other two regions, suggesting that the PPA is the key region involved in learning the different perceptual instantiations of a landmark. In contrast, generalization depended on the ability to freely retrieve information from memory in RSC, and it did not depend on familiarity or cognitive task in OPA. Together, these results suggest a tripartite division of labor, whereby PPA codes landmark identity, RSC retrieves spatial or conceptual information associated with landmarks, and OPA processes visual features that are important for landmark recognition.A central element of spatial navigation is the ability to recognize the landmarks that mark different places in the world. However, little is known about how the brain performs this function. Here we show that the parahippocampal place area (PPA), a region in human occipitotemporal cortex, exhibits key features of a landmark recognition mechanism. Specifically, the PPA treats different perceptual instantiations of the same landmark as representationally similar, but only when subjects have enough experience to know the correspondences among the stimuli. We also identify two other brain regions that exhibit landmark generalization, but with less sensitivity to familiarity. These results elucidate the brain networks involved in the learning and recognition of navigational landmarks.Copyright © 2015 the authors 0270-6474/15/3514896-13$15.00/0.
Mental representations of spatial relations
The network of reference frames theory:A synthesis of graphs and cognitive maps
In: Freksa, C., Newcombe, N. S., Gärdenfors, P., Wölfl, S. (Eds.),
Qualitative differences in memory for vista and environmental spaces are caused by opaque borders, not movement or successive presentation
DOI:S0010-0277(16)30150-0
PMID:27367592
[本文引用: 3]
Two classes of space define our everyday experience within our surrounding environment: vista spaces, such as rooms or streets which can be perceived from one vantage point, and environmental spaces, for example, buildings and towns which are grasped from multiple views acquired during locomotion. However, theories of spatial representations often treat both spaces as equal. The present experiments show that this assumption cannot be upheld. Participants learned exactly the same layout of objects either within a single room or spread across multiple corridors. By utilizing a pointing and a placement task we tested the acquired configurational memory. In Experiment 1 retrieving memory of the object layout acquired in environmental space was affected by the distance of the traveled path and the order in which the objects were learned. In contrast, memory retrieval of objects learned in vista space was not bound to distance and relied on different ordering schemes (e.g., along the layout structure). Furthermore, spatial memory of both spaces differed with respect to the employed reference frame orientation. Environmental space memory was organized along the learning experience rather than layout intrinsic structure. In Experiment 2 participants memorized the object layout presented within the vista space room of Experiment 1 while the learning procedure emulated environmental space learning (movement, successive object presentation). Neither factor rendered similar results as found in environmental space learning. This shows that memory differences between vista and environmental space originated mainly from the spatial compartmentalization which was unique to environmental space learning. Our results suggest that transferring conclusions from findings obtained in vista space to environmental spaces and vice versa should be made with caution.Copyright © 2016 Elsevier B.V. All rights reserved.
Memory for routes
DOI:10.1080/14640748208400850
URL
[本文引用: 1]
Two experiments examined the acquisition of cognitive maps of two intersecting routes through an urban area. In the presentation stage of the experiments, slides of the two routes were shown in order to simulate travel along the routes. The number of presentations of the slides was varied. In the test stage, subjects made directional and distance judgements from memory between places on the routes. The results suggest that from the start of acquisition of the spatial layout of the routes, subjects used network schemata in which both routes were combined, rather than a separate scheme for each route which were later combined. During initial acquisitions of the routes, a direction of travel bias was found such that spatial judgements from memory tended to be more accurate in the direction of travel along the routes than in the opposite direction. The findings imply that, at least during early acquisition, the spatial properties of the routes were encoded in terms of sequential associations.
Distances between real-world locations are represented in the human hippocampus
DOI:10.1523/JNEUROSCI.4667-10.2011
PMID:21273408
[本文引用: 1]
Spatial navigation is believed to be guided in part by reference to an internal map of the environment. We used functional magnetic resonance imaging (fMRI) to test for a key aspect of a cognitive map: preservation of real-world distance relationships. University students were scanned while viewing photographs of familiar campus landmarks. fMRI response levels in the left hippocampus corresponded to real-world distances between landmarks shown on successive trials, indicating that this region considered closer landmarks to be more representationally similar and more distant landmarks to be more representationally distinct. In contrast, posterior visually responsive regions such as retrosplenial complex and the parahippocampal place area were sensitive to landmark repetition and encoded landmark identity in their multivoxel activity patterns but did not show a distance-related response. These data suggest the existence of a map-like representation in the human medial temporal lobe that encodes the coordinates of familiar locations in large-scale, real-world environments.
Place cells, grid cells, and the brain's spatial representation system
DOI:10.1146/annurev.neuro.31.061307.090723
PMID:18284371
[本文引用: 1]
More than three decades of research have demonstrated a role for hippocampal place cells in representation of the spatial environment in the brain. New studies have shown that place cells are part of a broader circuit for dynamic representation of self-location. A key component of this network is the entorhinal grid cells, which, by virtue of their tessellating firing fields, may provide the elements of a path integration-based neural map. Here we review how place cells and grid cells may form the basis for quantitative spatiotemporal representation of places, routes, and associated experiences during behavior and in memory. Because these cell types have some of the most conspicuous behavioral correlates among neurons in nonsensory cortical systems, and because their spatial firing structure reflects computations internally in the system, studies of entorhinal-hippocampal representations may offer considerable insight into general principles of cortical network dynamics.
Goal-seeking compresses neural codes for space in the human hippocampus and orbitofrontal cortex
The generalized spatial representation in the prefrontal cortex is inherited from the hippocampus
The hippocampus as a spatial map: Preliminary evidence from unit activity in the freely-moving rat.
DOI:10.1016/0006-8993(71)90358-1 URL [本文引用: 2]
Coding of navigational distance and functional constraint of boundaries in the human scene-selective cortex
DOI:10.1523/JNEUROSCI.1991-19.2020
PMID:32209608
[本文引用: 2]
For visually guided navigation, the use of environmental cues is essential. Particularly, detecting local boundaries that impose limits to locomotion and estimating their location is crucial. In a series of three fMRI experiments, we investigated whether there is a neural coding of navigational distance in the human visual cortex (both female and male). We used virtual reality software to systematically manipulate the distance from a viewer perspective to different types of a boundary. Using a multivoxel pattern classification employing a linear support vector machine, we found that the occipital place area (OPA) is sensitive to the navigational distance restricted by the transparent glass wall. Further, the OPA was sensitive to a non-crossable boundary only, suggesting an importance of the functional constraint of a boundary. Together, we propose the OPA as a perceptual source of external environmental features relevant for navigation. One of major goals in cognitive neuroscience has been to understand the nature of visual scene representation in human ventral visual cortex. An aspect of scene perception that has been overlooked despite its ecological importance is the analysis of space for navigation. One of critical computation necessary for navigation is coding of distance to environmental boundaries that impose limit on navigator's movements. This paper reports the first empirical evidence for coding of navigational distance in the human visual cortex and its striking sensitivity to functional constraint of environmental boundaries. Such finding links the paper to previous neurological and behavioral works that emphasized the distance to boundaries as a crucial geometric property for reorientation behavior of children and other animal species.Copyright © 2020 the authors.
Inferences on a multidimensional social hierarchy use a grid-like code
DOI:10.1038/s41593-021-00916-3
PMID:34465915
[本文引用: 1]
Generalizing experiences to guide decision-making in novel situations is a hallmark of flexible behavior. Cognitive maps of an environment or task can theoretically afford such flexibility, but direct evidence has proven elusive. In this study, we found that discretely sampled abstract relationships between entities in an unseen two-dimensional social hierarchy are reconstructed into a unitary two-dimensional cognitive map in the hippocampus and entorhinal cortex. We further show that humans use a grid-like code in entorhinal cortex and medial prefrontal cortex for inferred direct trajectories between entities in the reconstructed abstract space during discrete decisions. These grid-like representations in the entorhinal cortex are associated with decision value computations in the medial prefrontal cortex and temporoparietal junction. Collectively, these findings show that grid-like representations are used by the human brain to infer novel solutions, even in abstract and discrete problems, and suggest a general mechanism underpinning flexible decision-making and generalization.© 2021. The Author(s), under exclusive licence to Springer Nature America, Inc.
Map making: Constructing, combining, and inferring on abstract cognitive maps
DOI:S0896-6273(20)30484-0
PMID:32702288
Cognitive maps enable efficient inferences from limited experience that can guide novel decisions. We tested whether the hippocampus (HC), entorhinal cortex (EC), and ventromedial prefrontal cortex (vmPFC)/medial orbitofrontal cortex (mOFC) organize abstract and discrete relational information into a cognitive map to guide novel inferences. Subjects learned the status of people in two unseen 2D social hierarchies, with each dimension learned on a separate day. Although one dimension was behaviorally relevant, multivariate activity patterns in HC, EC, and vmPFC/mOFC were linearly related to the Euclidean distance between people in the mentally reconstructed 2D space. Hubs created unique comparisons between the hierarchies, enabling inferences between novel pairs. We found that both behavior and neural activity in EC and vmPFC/mOFC reflected the Euclidean distance to the retrieved hub, which was reinstated in HC. These findings reveal how abstract and discrete relational structures are represented, are combined, and enable novel inferences in the human brain.Copyright © 2020 Elsevier Inc. All rights reserved.
The versatile wayfinder: Prefrontal contributions to spatial navigation
DOI:10.1016/j.tics.2021.02.010
PMID:33752958
[本文引用: 1]
The prefrontal cortex (PFC) supports decision-making, goal tracking, and planning. Spatial navigation is a behavior that taxes these cognitive processes, yet the role of the PFC in models of navigation has been largely overlooked. In humans, activity in dorsolateral PFC (dlPFC) and ventrolateral PFC (vlPFC) during detours, reveal a role in inhibition and replanning. Dorsal anterior cingulate cortex (dACC) is implicated in planning and spontaneous internally-generated changes of route. Orbitofrontal cortex (OFC) integrates representations of the environment with the value of actions, providing a 'map' of possible decisions. In rodents, medial frontal areas interact with hippocampus during spatial decisions and switching between navigation strategies. In reviewing these advances, we provide a framework for how different prefrontal regions may contribute to different stages of navigation.Copyright © 2021 Elsevier Ltd. All rights reserved.
Structuring knowledge with cognitive maps and cognitive graphs
DOI:10.1016/j.tics.2020.10.004
PMID:33248898
[本文引用: 1]
Humans and animals use mental representations of the spatial structure of the world to navigate. The classical view is that these representations take the form of Euclidean cognitive maps, but alternative theories suggest that they are cognitive graphs consisting of locations connected by paths. We review evidence suggesting that both map-like and graph-like representations exist in the mind/brain that rely on partially overlapping neural systems. Maps and graphs can operate simultaneously or separately, and they may be applied to both spatial and nonspatial knowledge. By providing structural frameworks for complex information, cognitive maps and cognitive graphs may provide fundamental organizing schemata that allow us to navigate in physical, social, and conceptual spaces.Copyright © 2020 Elsevier Ltd. All rights reserved.
Intersection as key locations for bearded capuchin monkeys (Sapajus libidinosus) traveling within a route network
DOI:10.1007/s10071-018-1176-0
PMID:29532262
[本文引用: 1]
There is evidence that wild animals are able to recall key locations and associate them with navigational routes. Studies in primate navigation suggest most species navigate through the route network system, using intersections among routes as locations of decision-making. Recent approaches presume that points of directional change may be key locations where animals decide where to go next. Over four consecutive years, we observed how a wild group of bearded capuchin monkeys used a route network system and Change Point locations (CPs) in the Brazilian ecotone of Cerrado-Caatinga. We built 200 daily routes of one wild bearded capuchin group. We used ArcGIS, the Change Point Test, Spatial Analysis in Macroecology (SAM), and statistical models to test the hypothesis that wild bearded capuchins use CPs located along routes in a different fashion than they use the CPs located at intersections of routes. A logistic regression model was used to determine the landscape variables affecting capuchins' directional changes at intersections or along routes. CPs at intersections were important points of travel path changes, whereas CPs along routes represented a zig-zag movement along the routes following the landscape features. CPs at intersections were associated with steeper terrains and shorter distances from important resources, along with better visibility of the home range. Our results support the hypothesis that intersections among routes in the route network system are located at points where monkeys have the best visibility available to make decisions on where to visit next.
Neural representations integrate the current field of view with the remembered 360 panorama in scene-selective cortex
DOI:S0960-9822(16)30753-9
PMID:27618266
[本文引用: 1]
We experience our visual environment as a seamless, immersive panorama. Yet, each view is discrete and fleeting, separated by expansive eye movements and discontinuous views of our spatial surroundings. How are discrete views of a panoramic environment knit together into a broad, unified memory representation? Regions of the brain's "scene network" are well poised to integrate retinal input and memory [1]: they are visually driven [2, 3] but also densely interconnected with memory structures in the medial temporal lobe [4]. Further, these regions harbor memory signals relevant for navigation [5-8] and adapt across overlapping shifts in scene viewpoint [9, 10]. However, it is unknown whether regions of the scene network support visual memory for the panoramic environment outside of the current field of view and, further, how memory for the surrounding environment influences ongoing perception. Here, we demonstrate that specific regions of the scene network-the retrosplenial complex (RSC) and occipital place area (OPA)-unite discrete views of a 360° panoramic environment, both current and out of sight, in a common representational space. Further, individual scene views prime associated representations of the panoramic environment in behavior, facilitating subsequent perceptual judgments. We propose that this dynamic interplay between memory and perception plays an important role in weaving the fabric of continuous visual experience.Copyright © 2016 Elsevier Ltd. All rights reserved.
Topographically organized representation of space and context in the medial prefrontal cortex
Navigating social space
DOI:S0896-6273(18)30894-8
PMID:30359610
[本文引用: 1]
Cognitive maps are encoded in the hippocampal formation and related regions and range from the spatial to the purely conceptual. Neural mechanisms that encode information into relational structures, up to an arbitrary level of abstraction, may explain such a broad range of representation. Research now indicates that social life can also be mapped by these mechanisms: others' spatial locations, social memory, and even a two-dimensional social space framed by social power and affiliation. The systematic mapping of social life onto a relational social space facilitates adaptive social decision making, akin to social navigation. This emerging line of research has implications for cognitive mapping research, clinical disorders that feature hippocampal dysfunction, and the field of social cognitive neuroscience.Copyright © 2018 Elsevier Inc. All rights reserved.
Neural correlates of real-world route learning
DOI:10.1016/j.neuroimage.2010.06.065
PMID:20603219
[本文引用: 1]
Classical theories of spatial microgenesis (Siegel and White, 1975) posit that information about landmarks and the paths between them is acquired prior to the establishment of more holistic survey-level representations. To test this idea, we examined the neural and behavioral correlates of landmark and path encoding during a real-world route learning episode. Subjects were taught a novel 3 km route around the University of Pennsylvania campus and then brought to the laboratory where they performed a recognition task that required them to discriminate between on-route and off-route buildings. Each building was preceded by a masked prime, which could either be the building that immediately preceded the target building along the route or immediately succeeded it. Consistent with previous reports using a similar paradigm in a virtual environment (Janzen and Weststeijn, 2007), buildings at navigational decision points (DPs) were more easily recognized than non-DP buildings and recognition was facilitated by in-route vs. against-route primes. Functional magnetic resonance imaging (fMRI) data collected during the recognition task revealed two effects of interest: first, greater response to DP vs. non-DP buildings in a wide network of brain regions previously implicated in spatial processing; second, a significant interaction between building location (DP vs. non-DP) and route direction (in-route vs. against-route) in a retrosplenial/parietal-occipital sulcus region previously labeled the retrosplenial complex (RSC). These results indicate that newly learned real-world routes are coded in terms of paths between decision points and suggest that the RSC may be a critical locus for integrating landmark and path information.Copyright 2010 Elsevier Inc. All rights reserved.
Hippocampal global remapping can occur without input from the medial entorhinal cortex
DOI:S2211-1247(18)30292-4
PMID:29562172
[本文引用: 1]
The high storage capacity of the episodic memory system relies on distinct representations for events that are separated in time and space. The spatial component of these computations includes the formation of independent maps by hippocampal place cells across environments, referred to as global remapping. Such remapping is thought to emerge by the switching of input patterns from specialized spatially selective cells in medial entorhinal cortex (mEC), such as grid and border cells. Although it has been shown that acute manipulations of mEC firing patterns are sufficient for inducing hippocampal remapping, it remains unknown whether specialized spatial mEC inputs are necessary for the reorganization of hippocampal spatial representations. Here, we examined remapping in rats without mEC input to the hippocampus and found that highly distinct spatial maps emerged rapidly in every individual rat. Our data suggest that hippocampal spatial computations do not depend on inputs from specialized cell types in mEC.Copyright © 2018 The Author(s). Published by Elsevier Inc. All rights reserved.
Human orbitofrontal cortex represents a cognitive map of state space
DOI:S0896-6273(16)30511-6
PMID:27657452
[本文引用: 1]
Although the orbitofrontal cortex (OFC) has been studied intensely for decades, its precise functions have remained elusive. We recently hypothesized that the OFC contains a "cognitive map" of task space in which the current state of the task is represented, and this representation is especially critical for behavior when states are unobservable from sensory input. To test this idea, we apply pattern-classification techniques to neuroimaging data from humans performing a decision-making task with 16 states. We show that unobservable task states can be decoded from activity in OFC, and decoding accuracy is related to task performance and the occurrence of individual behavioral errors. Moreover, similarity between the neural representations of consecutive states correlates with behavioral accuracy in corresponding state transitions. These results support the idea that OFC represents a cognitive map of task space and establish the feasibility of decoding state representations in humans using non-invasive neuroimaging. Copyright © 2016 Elsevier Inc. All rights reserved.
Deficits in strategy application following frontal lobe damage in man.
DOI:10.1093/brain/114.2.727 URL [本文引用: 1]
Double dissociation between hippocampal and prefrontal lesions on an operant delayed matching task and a water maze reference memory task
The hippocampus and prefrontal cortex have both been implicated in various aspects of the acquisition, retention and performance of delayed matching to position (DMTP) tasks in the rat, although their precise respective contributions remain unclear. In the present study, rats were trained preoperatively on DMTP before receiving excitotoxic bilateral lesions of either the entire hippocampus or the medial prefrontal cortex. Rats with lesions of the prefrontal cortex exhibited a significant delay-dependent impairment on retention of the DMTP task, whereas hippocampal lesions were without effect. Rats were also exposed to a switch in the contingencies to a 'non-matching' rule, as an analogue of switching between decision rules in the human Wisconsin Card Sorting Test, in which human patients with prefrontal damage are impaired. Both lesion groups acquired the new contingency at control levels, providing no evidence towards a role for either of these areas in this type of rule-switching. The same rats were also assessed in a spatial reference memory task in the water maze, which revealed an impairment in escape latencies and path length that was specific to the hippocampal lesions. The results corroborate previous evidence that the hippocampus is not necessary for at least some aspects of working memory performance in the DMTP task, whereas the delay-dependent deficit in the prefrontal lesion group support this task as a potentially powerful tool for assessing the cognitive changes associated with frontal damage and repair.
Cognitive maps of social features enable flexible inference in social networks
The hippocampus as a predictive map.
DOI:10.1038/nn.4650
PMID:28967910
[本文引用: 1]
A cognitive map has long been the dominant metaphor for hippocampal function, embracing the idea that place cells encode a geometric representation of space. However, evidence for predictive coding, reward sensitivity and policy dependence in place cells suggests that the representation is not purely spatial. We approach this puzzle from a reinforcement learning perspective: what kind of spatial representation is most useful for maximizing future reward? We show that the answer takes the form of a predictive representation. This representation captures many aspects of place cell responses that fall outside the traditional view of a cognitive map. Furthermore, we argue that entorhinal grid cells encode a low-dimensionality basis set for the predictive representation, useful for suppressing noise in predictions and extracting multiscale structure for hierarchical planning.
The entorhinal grid map is discretized
DOI:10.1038/nature11649 [本文引用: 1]
Distortions in judged spatial relations
Beyond cognitive templates: Re-examining template metaphors used for animal recognition and navigation
DOI:10.1093/icb/icab040
URL
[本文引用: 1]
The term “cognitive template” originated from work in human-based cognitive science to describe a literal, stored, neural representation used in recognition tasks. As the study of cognition has expanded to nonhuman animals, the term has diffused to describe a wider range of animal cognitive tools and strategies that guide action through the recognition of and discrimination between external states. One potential reason for this nonstandardized meaning and variable employment is that researchers interested in the broad range of animal recognition tasks enjoy the simplicity of the cognitive template concept and have allowed it to become shorthand for many dissimilar or unknown neural processes without deep scrutiny of how this metaphor might comport with underlying neurophysiology. We review the functional evidence for cognitive templates in fields such as perception, navigation, communication, and learning, highlighting any neural correlates identified by these studies. We find that the concept of cognitive templates has facilitated valuable exploration at the interface between animal behavior and cognition, but the quest for a literal template has failed to attain mechanistic support at the level of neurophysiology. This may be the result of a misled search for a single physical locus for the “template” itself. We argue that recognition and discrimination processes are best treated as emergent and, as such, may not be physically localized within single structures of the brain. Rather, current evidence suggests that such tasks are accomplished through synergies between multiple distributed processes in animal nervous systems. We thus advocate for researchers to move toward a more ecological, process-oriented conception, especially when discussing the neural underpinnings of recognition-based cognitive tasks.
Head- direction cells recorded from the postsubiculum in freely moving rats. I. Description and quantitative analysis
This paper is a study of the behavioral and spatial firing correlates of neurons in the rat postsubiculum. Recordings were made from postsubicular neurons as rats moved freely throughout a cylindrical chamber, where the major cue for orientation was a white card taped to the inside wall. An automatic video/computer system monitored cell discharge while simultaneously tracking the position of 2 colored light emitting diodes (LEDs) secured to the animal's head. The animal's location was calculated from the position of one of the LEDs and head direction in the horizontal plane calculated from the relative positions of the 2 LEDs. Approximately 26% of the cells were classified as head-direction cells because they discharged as a function of the animal's head direction in the horizontal plane, independent of the animal's behavior, location, or trunk position. For each head-direction cell, vectors drawn in the direction of maximal firing were parallel throughout the recording chamber and did not converge toward a single point. Plots of firing rate versus head direction showed that each firing-rate/head-direction function was adequately described by a triangular function. Each cell's maximum firing rate occurred at only one (the preferred) head direction; firing rates at head directions on either side of the preferred direction decreased linearly with angular deviation from the preferred direction. Results from 24 head-direction cells in 7 animals showed an equal distribution of preferred firing directions over a 360 degrees angle. The peak firing rate of head-direction cells varied from 5 to 115 spikes/sec (mean: 35). The range of head-direction angles over which discharge was elevated (directional firing range) was usually about 90 degrees, with little, if any, discharge at head directions outside this range. Quantitative analysis showed the location of the animal within the cylinder had minimal effect on directional cell firing. For each head-direction cell, the preferred direction, peak firing rate, and directional firing range remained stable for days. These results identify a new cell type that signals the animal's head direction in its environment.
Distance estimation from cognitive maps
DOI:10.1016/0010-0285(81)90019-0 URL [本文引用: 2]
Distortions in memory for maps
DOI:10.1016/0010-0285(81)90016-5 URL [本文引用: 1]
Cognitive maps in rats and men.
DOI:10.1037/h0061626 URL PMID:18870876 [本文引用: 2]
Cognitive maps, cognitive collages, and spatial mental models
In: Frank, A. U., Campari, I. (Eds.),
Human navigation in nested environments
DOI:10.1037/0278-7393.29.3.398 URL [本文引用: 1]
Non-euclidean navigation
Wormholes in virtual space: From cognitive maps to cognitive graphs
DOI:S0010-0277(17)30137-3
PMID:28577445
[本文引用: 2]
Humans and other animals build up spatial knowledge of the environment on the basis of visual information and path integration. We compare three hypotheses about the geometry of this knowledge of navigation space: (a) 'cognitive map' with metric Euclidean structure and a consistent coordinate system, (b) 'topological graph' or network of paths between places, and (c) 'labelled graph' incorporating local metric information about path lengths and junction angles. In two experiments, participants walked in a non-Euclidean environment, a virtual hedge maze containing two 'wormholes' that visually rotated and teleported them between locations. During training, they learned the metric locations of eight target objects from a 'home' location, which were visible individually. During testing, shorter wormhole routes to a target were preferred, and novel shortcuts were directional, contrary to the topological hypothesis. Shortcuts were strongly biased by the wormholes, with mean constant errors of 37° and 41° (45° expected), revealing violations of the metric postulates in spatial knowledge. In addition, shortcuts to targets near wormholes shifted relative to flanking targets, revealing 'rips' (86% of cases), 'folds' (91%), and ordinal reversals (66%) in spatial knowledge. Moreover, participants were completely unaware of these geometric inconsistencies, reflecting a surprising insensitivity to Euclidean structure. The probability of the shortcut data under the Euclidean map model and labelled graph model indicated decisive support for the latter (BF>100). We conclude that knowledge of navigation space is best characterized by a labelled graph, in which local metric information is approximate, geometrically inconsistent, and not embedded in a common coordinate system. This class of 'cognitive graph' models supports route finding, novel detours, and rough shortcuts, and has the potential to unify a range of data on spatial navigation.Copyright © 2017 Elsevier B.V. All rights reserved.
Integration of grid maps in merged environments
DOI:10.1038/s41593-017-0036-6
PMID:29230051
[本文引用: 1]
Natural environments are represented by local maps of grid cells and place cells that are stitched together. The manner by which transitions between map fragments are generated is unknown. We recorded grid cells while rats were trained in two rectangular compartments, A and B (each 1 m × 2 m), separated by a wall. Once distinct grid maps were established in each environment, we removed the partition and allowed the rat to explore the merged environment (2 m × 2 m). The grid patterns were largely retained along the distal walls of the box. Nearer the former partition line, individual grid fields changed location, resulting almost immediately in local spatial periodicity and continuity between the two original maps. Grid cells belonging to the same grid module retained phase relationships during the transformation. Thus, when environments are merged, grid fields reorganize rapidly to establish spatial periodicity in the area where the environments meet.
The Tolman - Eichenbaum machine: Unifying space and relational memory through generalization in the hippocampal formation
DOI:10.1016/j.cell.2020.10.024
PMID:33181068
[本文引用: 1]
The hippocampal-entorhinal system is important for spatial and relational memory tasks. We formally link these domains, provide a mechanistic understanding of the hippocampal role in generalization, and offer unifying principles underlying many entorhinal and hippocampal cell types. We propose medial entorhinal cells form a basis describing structural knowledge, and hippocampal cells link this basis with sensory representations. Adopting these principles, we introduce the Tolman-Eichenbaum machine (TEM). After learning, TEM entorhinal cells display diverse properties resembling apparently bespoke spatial responses, such as grid, band, border, and object-vector cells. TEM hippocampal cells include place and landmark cells that remap between environments. Crucially, TEM also aligns with empirically recorded representations in complex non-spatial tasks. TEM also generates predictions that hippocampal remapping is not random as previously believed; rather, structural knowledge is preserved across environments. We confirm this structural transfer over remapping in simultaneously recorded place and grid cells.Copyright © 2020 The Authors. Published by Elsevier Inc. All rights reserved.
Human navigation in curved spaces
DOI:10.1016/j.cognition.2021.104923 URL [本文引用: 2]
Flexible rerouting of hippocampal replay sequences around changing barriers in the absence of global place field remapping
DOI:10.1016/j.neuron.2022.02.002
PMID:35180390
[本文引用: 2]
Flexibility is a hallmark of memories that depend on the hippocampus. For navigating animals, flexibility is necessitated by environmental changes such as blocked paths and extinguished food sources. To better understand the neural basis of this flexibility, we recorded hippocampal replays in a spatial memory task where barriers as well as goals were moved between sessions to see whether replays could adapt to new spatial and reward contingencies. Strikingly, replays consistently depicted new goal-directed trajectories around each new barrier configuration and largely avoided barrier violations. Barrier-respecting replays were learned rapidly and did not rely on place cell remapping. These data distinguish sharply between place field responses, which were largely stable and remained tied to sensory cues, and replays, which changed flexibly to reflect the learned contingencies in the environment and suggest sequenced activations such as replay to be an important link between the hippocampus and flexible memory.Copyright © 2022. Published by Elsevier Inc.
Hippocampal replay captures the unique topological structure of a novel environment
DOI:10.1523/JNEUROSCI.3414-13.2014
PMID:24806672
[本文引用: 1]
Hippocampal place-cell replay has been proposed as a fundamental mechanism of learning and memory, which might support navigational learning and planning. An important hypothesis of relevance to these proposed functions is that the information encoded in replay should reflect the topological structure of experienced environments; that is, which places in the environment are connected with which others. Here we report several attributes of replay observed in rats exploring a novel forked environment that support the hypothesis. First, we observed that overlapping replays depicting divergent trajectories through the fork recruited the same population of cells with the same firing rates to represent the common portion of the trajectories. Second, replay tended to be directional and to flip the represented direction at the fork. Third, replay-associated sharp-wave-ripple events in the local field potential exhibited substructure that mapped onto the maze topology. Thus, the spatial complexity of our recording environment was accurately captured by replay: the underlying neuronal activities reflected the bifurcating shape, and both directionality and associated ripple structure reflected the segmentation of the maze. Finally, we observed that replays occurred rapidly after small numbers of experiences. Our results suggest that hippocampal replay captures learned information about environmental topology to support a role in navigation.
Redundancy and reducibility in the formats of spatial representations
DOI:10.1177/17456916221077115
URL
[本文引用: 1]
Mental representations are the essence of cognition. Yet to understand how the mind works, one must understand not just the content of mental representations (i.e., what information is stored) but also the format of those representations (i.e., how that information is stored). But what does it mean for representations to be formatted? How many formats are there? Is it possible that the mind represents some pieces of information in multiple formats at once? To address these questions, I discuss a “case study” of representational format: the representation of spatial location. I review work (a) across species and across development, (b) across spatial scales, and (c) across levels of analysis (e.g., high-level cognitive format vs. low-level neural format). Along the way, I discuss the possibility that the same information may be organized in multiple formats simultaneously (e.g., that locations may be represented in both Cartesian and polar coordinates). Ultimately, I argue that seemingly “redundant” formats may support the flexible spatial behavior observed in humans and that researchers should approach the study of all mental representations with this possibility in mind.
Medial prefrontal cortex represents the object-based cognitive map when remembering an egocentric target location
DOI:10.1093/cercor/bhaa117
URL
[本文引用: 1]
A cognitive map, representing an environment around oneself, is necessary for spatial navigation. However, compared with its constituent elements such as individual landmarks, neural substrates of coherent spatial information, which consists in a relationship among the individual elements, remain largely unknown. The present study investigated how the brain codes map-like representations in a virtual environment specified by the relative positions of three objects. Representational similarity analysis revealed an object-based spatial representation in the hippocampus (HPC) when participants located themselves within the environment, while the medial prefrontal cortex (mPFC) represented it when they recollected a target object’s location relative to their self-body. During recollection, task-dependent functional connectivity increased between the two areas implying exchange of self-location and target location signals between the HPC and mPFC. Together, the object-based cognitive map, whose coherent spatial information could be formed by objects, may be recruited in the HPC and mPFC for complementary functions during navigation, which may generalize to other aspects of cognition, such as navigating social interactions.
A specific brain network for a social map in the human brain
DOI:10.1038/s41598-022-05601-4
URL
PMID:35110581
[本文引用: 1]
Individuals use social information to guide social interactions and to update relationships along multiple social dimensions. However, it is unclear what neural basis underlies this process of abstract "social navigation". In the current study, we recruited twenty-nine participants who performed a choose-your-own-adventure game in which they interacted with fictional characters during fMRI scanning. Using a whole-brain GLM approach, we found that vectors encoding two-dimensional information about the relationships predicted BOLD responses in the hippocampus and the precuneus, replicating previous work. We also explored whether these geometric representations were related to key brain regions previously identified in physical and abstract spatial navigation studies, but we did not find involvement of the entorhinal cortex, parahippocampal gyrus or the retrosplenial cortex. Finally, we used psychophysiological interaction analysis and identified a network of regions that correlated during participants' decisions, including the left posterior hippocampus, precuneus, dorsolateral prefrontal cortex (dlPFC), and the insula. Our findings suggest a brain network for social navigation in multiple abstract, social dimensions that includes the hippocampus, precuneus, dlPFC, and insula.© 2022. The Author(s).
Human spatial representation: What we cannot learn from the studies of rodent navigation
DOI:10.1152/jn.00781.2017
PMID:30133384
[本文引用: 2]
Studies of human and rodent navigation often reveal a remarkable cross-species similarity between the cognitive and neural mechanisms of navigation. Such cross-species resemblance often overshadows some critical differences between how humans and nonhuman animals navigate. In this review, I propose that a navigation system requires both a storage system (i.e., representing spatial information) and a positioning system (i.e., sensing spatial information) to operate. I then argue that the way humans represent spatial information is different from that inferred from the cellular activity observed during rodent navigation. Such difference spans the whole hierarchy of spatial representation, from representing the structure of an environment to the representation of subregions of an environment, routes and paths, and the distance and direction relative to a goal location. These cross-species inconsistencies suggest that what we learn from rodent navigation does not always transfer to human navigation. Finally, I argue for closing the loop for the dominant, unidirectional animal-to-human approach in navigation research so that insights from behavioral studies of human navigation may also flow back to shed light on the cellular mechanisms of navigation for both humans and other mammals (i.e., a human-to-animal approach).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}