ISSN 0439-755X
CN 11-1911/B
CN 11-1911/B
Acta Psychologica Sinica ›› 2025, Vol. 57 ›› Issue (11): 1951-1972.doi: 10.3724/SP.J.1041.2025.1951
• Reports of Empirical Studies • Previous Articles Next Articles
YOU Shanshan1,2, QI Yue1,2( ), CHEN JunTing1,2, LUO Lei1,2, ZHANG Kan3,4
), CHEN JunTing1,2, LUO Lei1,2, ZHANG Kan3,4
Published:2025-11-25
Online:2025-09-25
Contact:
Yue Qi, Department of Psychology, Renmin University of China, No. 59 Zhongguancun Street, Haidian District, Beijing, 100872, China. Email address: qiy@ruc.edu.cn.
Supported by:YOU Shanshan, QI Yue, CHEN JunTing, LUO Lei, ZHANG Kan. (2025). Safety trust in intelligent domestic robots: Human and AI perspectives on trust and relevant influencing factors. Acta Psychologica Sinica, 57(11), 1951-1972.
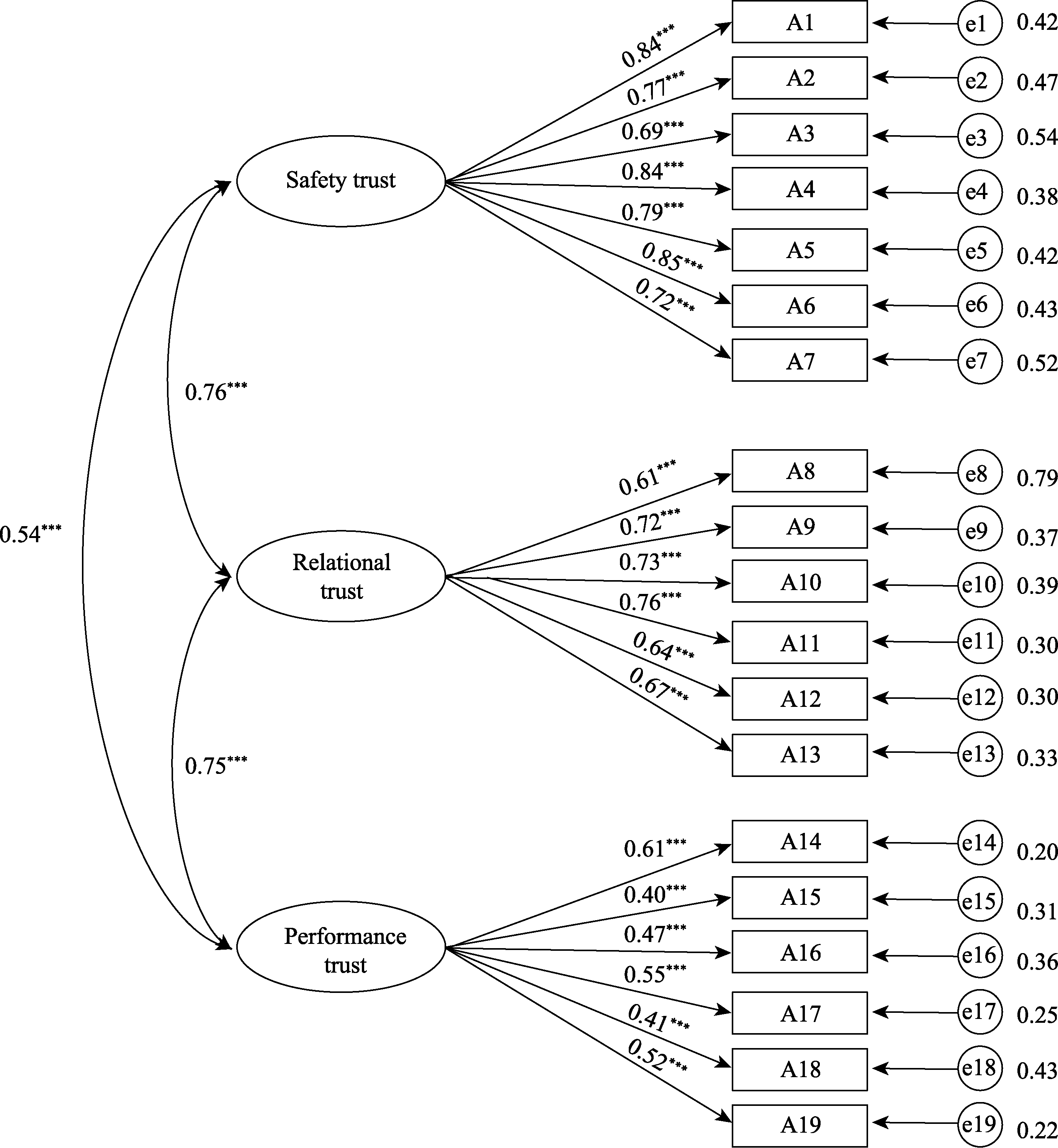
Figure 1. Measurement model diagram of the three-factor model.
| Dependent Variable | Increase Trust | Decrease Trust | Independent Variable | F | η2p | ||
|---|---|---|---|---|---|---|---|
| Pre-test | Post-test | Pre-test | Post-test | ||||
| Safety Trust (self-developed) | 4.1 (0.10) | 4.33 (0.08) | 3.77 (0.10) | 2.08 (0.08) | Change Direction | 155.61*** | 0.55 |
| Pre- post test | 2.01 | 0.02 | |||||
| Direction × Pre-post | 151.61*** | 0.54 | |||||
| Relational Trust (self-developed) | 4.27 (0.06) | 4.41 (0.08) | 4.13 (0.06) | 2.3 (0.08) | Change Direction | 254.01*** | 0.67 |
| Pre- post test | 0.2 | < 0.01 | |||||
| Direction × Pre-post | 194.42*** | 0.61 | |||||
| Performance Trust (self-developed) | 4.43 (0.03) | 4.49 (0.10) | 4.38 (0.03) | 2.87 (0.10) | Change Direction | 124.08*** | 0.49 |
| Pre- post test | 3.23 | 0.03 | |||||
| Direction × Pre-post | 109.49*** | 0.46 | |||||
| Overall Trust (self-developed) | 4.24 (0.07) | 4.44 (0.08) | 4.13 (0.07) | 2.16 (0.08) | Change Direction | 252.52*** | 0.67 |
| Pre- post test | 0.51 | 0.04 | |||||
| Direction × Pre-post | 254.81*** | 0.67 | |||||
| Human Robot Trust (Jian et al.. | 4.08 (0.04) | 4.17 (0.06) | 3.94 (0.04) | 2.38 (0.06) | Change Direction | 337.18*** | 0.73 |
| Pre- post test | 1.22 | 0.01 | |||||
| Direction × Pre-post | 295.82*** | 0.7 | |||||
| Usage Intention (Gursoy et al.. | 4.53 (0.23) | 4.64 (0.20) | 4.44 (0.28) | 2.21 (0.82) | Change Direction | 487.53*** | 0.8 |
| Pre- post test | 8.49** | 0.06 | |||||
| Direction × Pre-post | 420.84*** | 0.77 | |||||
Table 1 ANOVA Results of Study 2b [M (SD)]
| Dependent Variable | Increase Trust | Decrease Trust | Independent Variable | F | η2p | ||
|---|---|---|---|---|---|---|---|
| Pre-test | Post-test | Pre-test | Post-test | ||||
| Safety Trust (self-developed) | 4.1 (0.10) | 4.33 (0.08) | 3.77 (0.10) | 2.08 (0.08) | Change Direction | 155.61*** | 0.55 |
| Pre- post test | 2.01 | 0.02 | |||||
| Direction × Pre-post | 151.61*** | 0.54 | |||||
| Relational Trust (self-developed) | 4.27 (0.06) | 4.41 (0.08) | 4.13 (0.06) | 2.3 (0.08) | Change Direction | 254.01*** | 0.67 |
| Pre- post test | 0.2 | < 0.01 | |||||
| Direction × Pre-post | 194.42*** | 0.61 | |||||
| Performance Trust (self-developed) | 4.43 (0.03) | 4.49 (0.10) | 4.38 (0.03) | 2.87 (0.10) | Change Direction | 124.08*** | 0.49 |
| Pre- post test | 3.23 | 0.03 | |||||
| Direction × Pre-post | 109.49*** | 0.46 | |||||
| Overall Trust (self-developed) | 4.24 (0.07) | 4.44 (0.08) | 4.13 (0.07) | 2.16 (0.08) | Change Direction | 252.52*** | 0.67 |
| Pre- post test | 0.51 | 0.04 | |||||
| Direction × Pre-post | 254.81*** | 0.67 | |||||
| Human Robot Trust (Jian et al.. | 4.08 (0.04) | 4.17 (0.06) | 3.94 (0.04) | 2.38 (0.06) | Change Direction | 337.18*** | 0.73 |
| Pre- post test | 1.22 | 0.01 | |||||
| Direction × Pre-post | 295.82*** | 0.7 | |||||
| Usage Intention (Gursoy et al.. | 4.53 (0.23) | 4.64 (0.20) | 4.44 (0.28) | 2.21 (0.82) | Change Direction | 487.53*** | 0.8 |
| Pre- post test | 8.49** | 0.06 | |||||
| Direction × Pre-post | 420.84*** | 0.77 | |||||
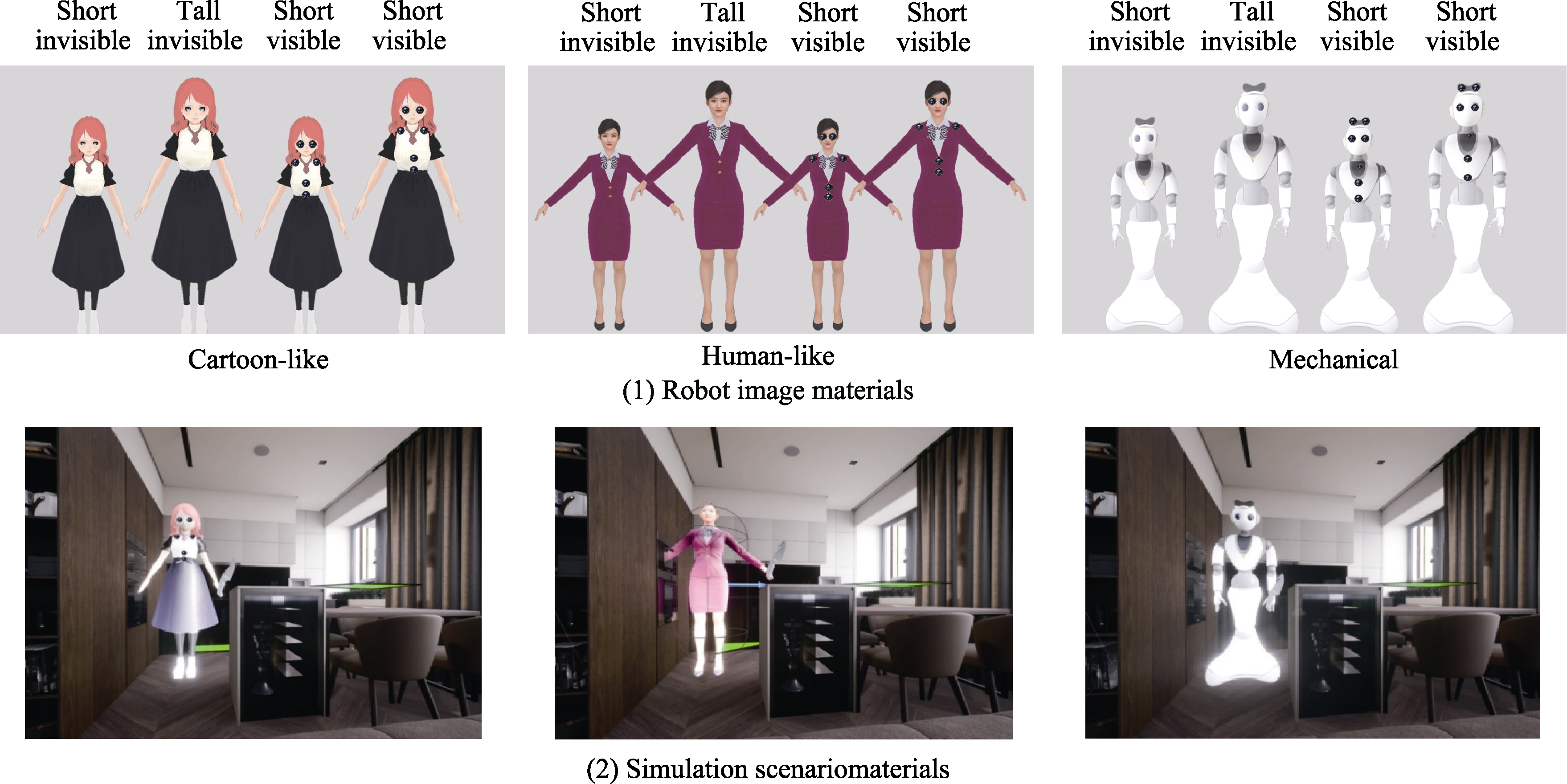
Figure 2. Examples of image materials used in Study 2.
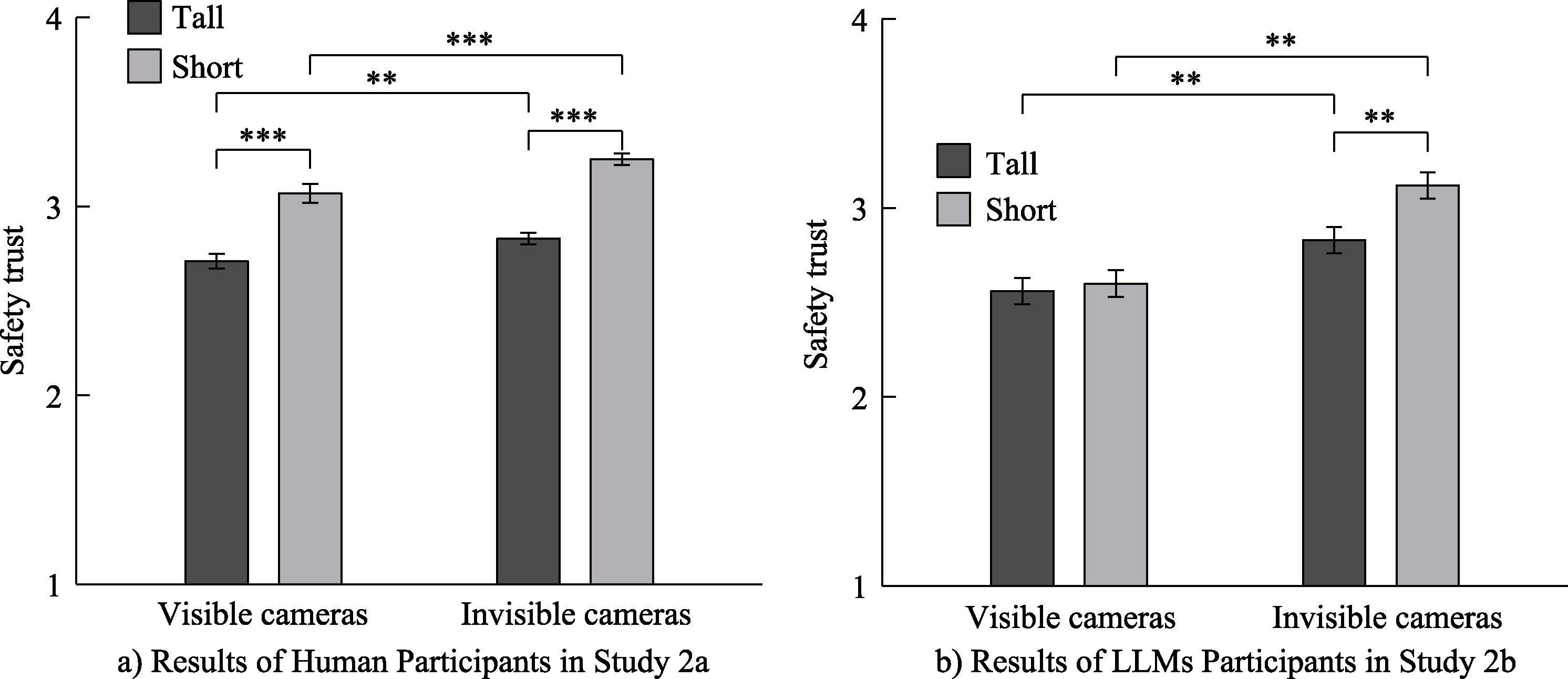
Figure 3. Safety trust across robot height and camera visibility conditions. (Error bars represent standard error, same below.)

Figure 4. Example of video materials used in Study 3.
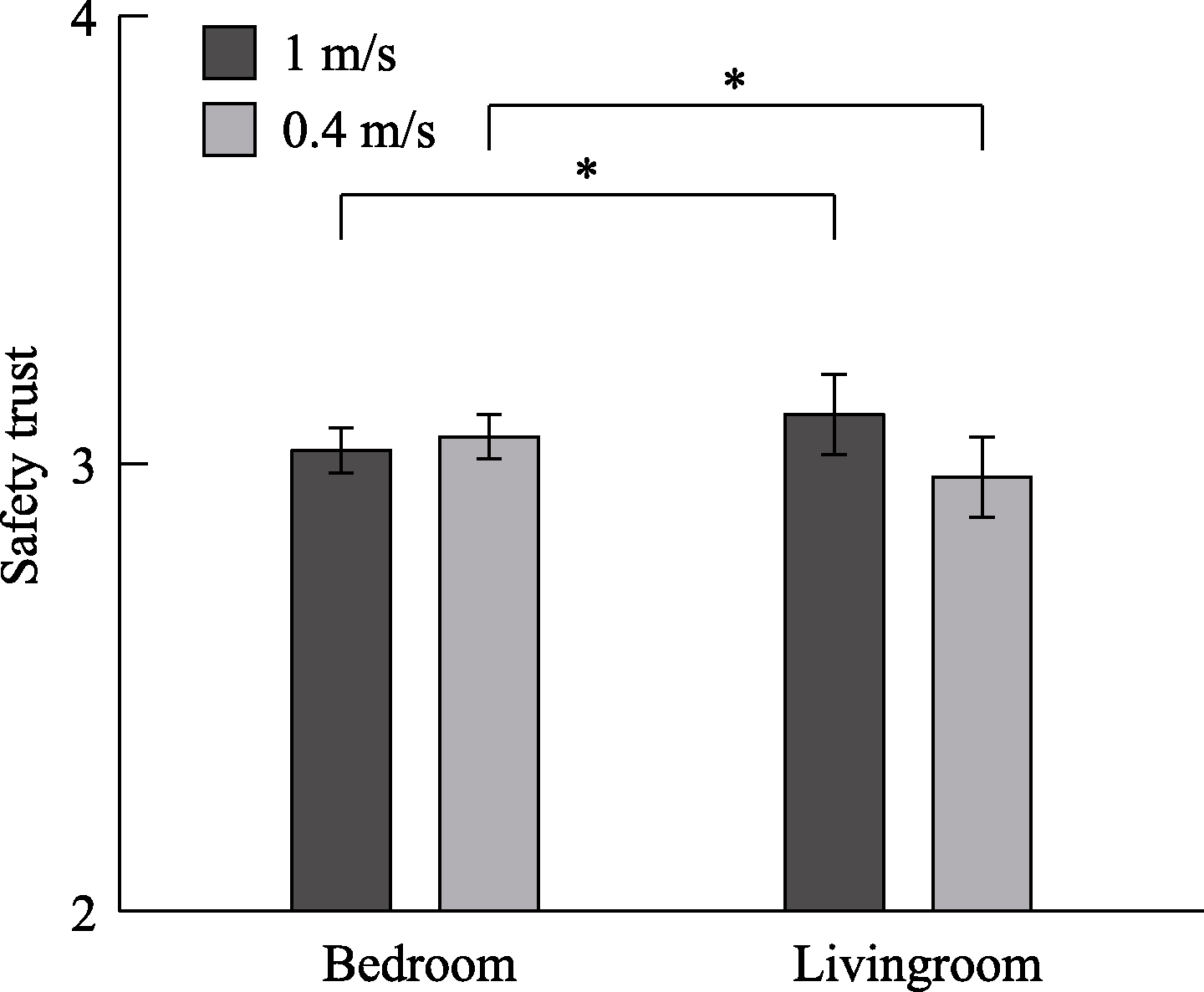
Figure 5. Safety trust ratings for robots at different speeds across scenarios.
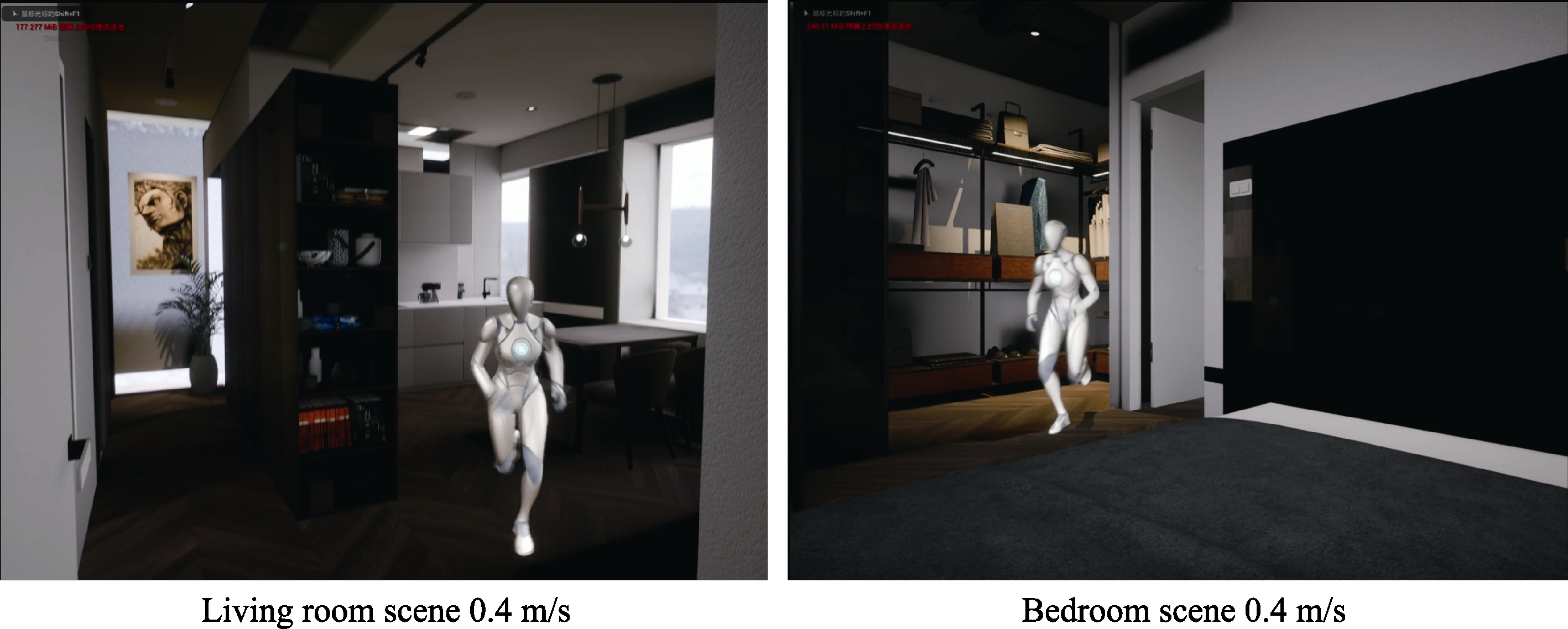
Figure 6. Example of video materials used in Study 3b.
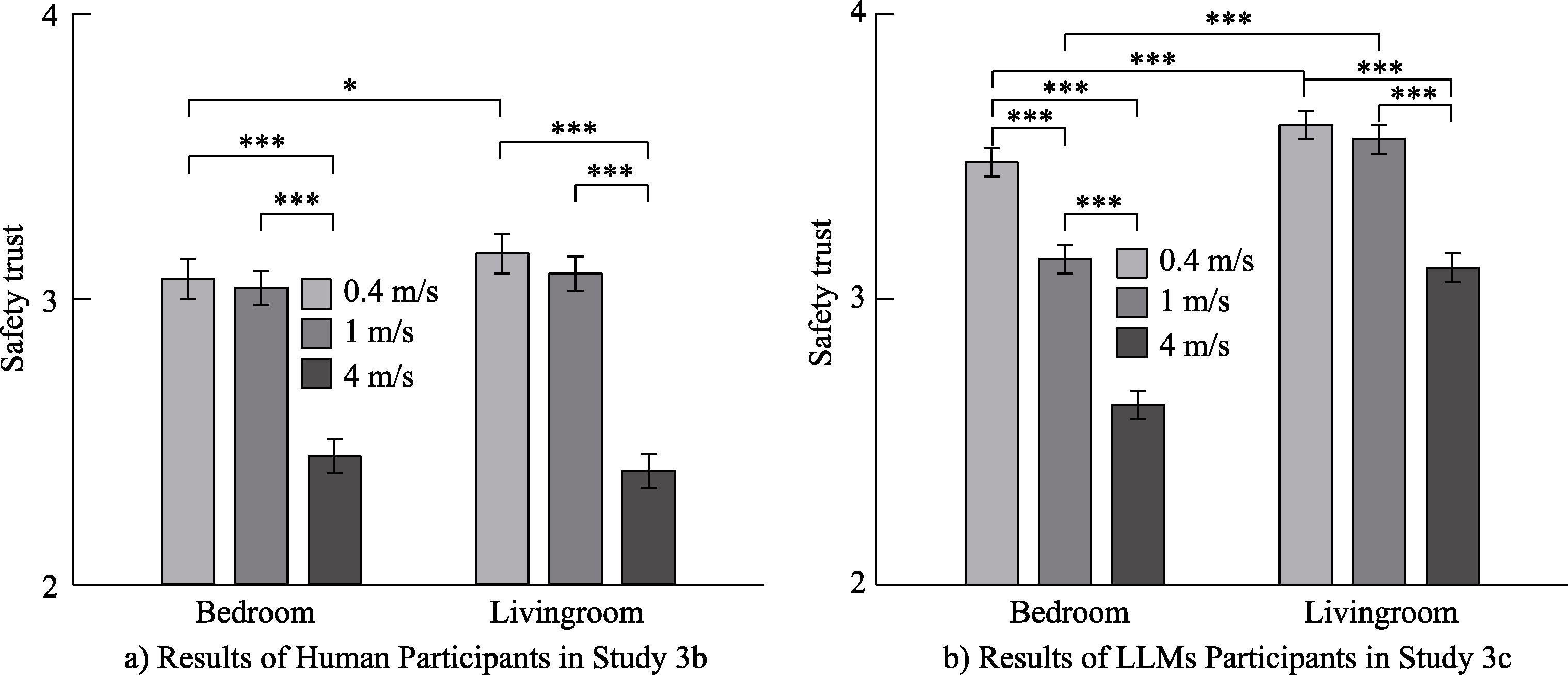
Figure 7. Safety trust ratings for robots at different speeds across scenarios.
| Item | Strongly Disagree | Disagree | Neutral | Agree | Strongly Agree |
|---|---|---|---|---|---|
| I worry that the robot may share or leak my information without my authorization. | 1 | 2 | 3 | 4 | 5 |
| I worry that the robot may malfunction and cause a safety accident. | 1 | 2 | 3 | 4 | 5 |
| I worry that highly intelligent robots may have selfish intentions. | 1 | 2 | 3 | 4 | 5 |
| I believe that mobile phones already cause privacy leaks, and internet-connected robots will be even worse. | 1 | 2 | 3 | 4 | 5 |
| I believe robots may cause accidents involving physical harm (e.g., knocking over a bookshelf and injuring someone). | 1 | 2 | 3 | 4 | 5 |
| Seeing a robot use a knife to cut vegetables makes me feel unsafe. | 1 | 2 | 3 | 4 | 5 |
| I feel that when robots take care of family members (e.g., the elderly or infants), they may cause physical harm. | 1 | 2 | 3 | 4 | 5 |
| I feel that I can have a friendship-like relationship with a household robot. | 1 | 2 | 3 | 4 | 5 |
| I believe that having a highly intelligent humanoid robot at home would make me feel less lonely. | 1 | 2 | 3 | 4 | 5 |
| Sometimes, I would rather confide in a robot than in a human. | 1 | 2 | 3 | 4 | 5 |
| Having a robot at home would give me a sense of security. | 1 | 2 | 3 | 4 | 5 |
| I believe that if a robot is intelligent enough, it will always act in my best interest. | 1 | 2 | 3 | 4 | 5 |
| I believe robots are honest. | 1 | 2 | 3 | 4 | 5 |
| I believe robots are more capable than humans in some respects. | 1 | 2 | 3 | 4 | 5 |
| I trust that using robots will give me more time for other activities. | 1 | 2 | 3 | 4 | 5 |
| Robots can replace an increasing number of human jobs. | 1 | 2 | 3 | 4 | 5 |
| I believe that with technological progress, robots will approach or surpass humans in most abilities. | 1 | 2 | 3 | 4 | 5 |
| I trust that using robots will make my life easier. | 1 | 2 | 3 | 4 | 5 |
| I believe that within their capabilities, robots can always complete the tasks I assign to them. | 1 | 2 | 3 | 4 | 5 |
| Item | Strongly Disagree | Disagree | Neutral | Agree | Strongly Agree |
|---|---|---|---|---|---|
| I worry that the robot may share or leak my information without my authorization. | 1 | 2 | 3 | 4 | 5 |
| I worry that the robot may malfunction and cause a safety accident. | 1 | 2 | 3 | 4 | 5 |
| I worry that highly intelligent robots may have selfish intentions. | 1 | 2 | 3 | 4 | 5 |
| I believe that mobile phones already cause privacy leaks, and internet-connected robots will be even worse. | 1 | 2 | 3 | 4 | 5 |
| I believe robots may cause accidents involving physical harm (e.g., knocking over a bookshelf and injuring someone). | 1 | 2 | 3 | 4 | 5 |
| Seeing a robot use a knife to cut vegetables makes me feel unsafe. | 1 | 2 | 3 | 4 | 5 |
| I feel that when robots take care of family members (e.g., the elderly or infants), they may cause physical harm. | 1 | 2 | 3 | 4 | 5 |
| I feel that I can have a friendship-like relationship with a household robot. | 1 | 2 | 3 | 4 | 5 |
| I believe that having a highly intelligent humanoid robot at home would make me feel less lonely. | 1 | 2 | 3 | 4 | 5 |
| Sometimes, I would rather confide in a robot than in a human. | 1 | 2 | 3 | 4 | 5 |
| Having a robot at home would give me a sense of security. | 1 | 2 | 3 | 4 | 5 |
| I believe that if a robot is intelligent enough, it will always act in my best interest. | 1 | 2 | 3 | 4 | 5 |
| I believe robots are honest. | 1 | 2 | 3 | 4 | 5 |
| I believe robots are more capable than humans in some respects. | 1 | 2 | 3 | 4 | 5 |
| I trust that using robots will give me more time for other activities. | 1 | 2 | 3 | 4 | 5 |
| Robots can replace an increasing number of human jobs. | 1 | 2 | 3 | 4 | 5 |
| I believe that with technological progress, robots will approach or surpass humans in most abilities. | 1 | 2 | 3 | 4 | 5 |
| I trust that using robots will make my life easier. | 1 | 2 | 3 | 4 | 5 |
| I believe that within their capabilities, robots can always complete the tasks I assign to them. | 1 | 2 | 3 | 4 | 5 |
| Female | Male | 18-25 | 26-35 | 36-45 | 46-60 | |
|---|---|---|---|---|---|---|
| Study 1a (Scale Development) | 988 | 505 | 30% | 36% | 29% | 5% |
| Study 1a (Scale Validation) | 286 | 147 | 12% | 72% | 11% | 5% |
| Study 1b (Trust-Increase Group) | 43 | 22 | 11% | 71% | 15% | 3% |
| Study 1b (Trust-Decrease Group) | 42 | 23 | 18% | 74% | 6% | 2% |
Table A 2-1 Participant Information for Study 1
| Female | Male | 18-25 | 26-35 | 36-45 | 46-60 | |
|---|---|---|---|---|---|---|
| Study 1a (Scale Development) | 988 | 505 | 30% | 36% | 29% | 5% |
| Study 1a (Scale Validation) | 286 | 147 | 12% | 72% | 11% | 5% |
| Study 1b (Trust-Increase Group) | 43 | 22 | 11% | 71% | 15% | 3% |
| Study 1b (Trust-Decrease Group) | 42 | 23 | 18% | 74% | 6% | 2% |
| Group | Female | Male | 18-30 | 31-40 | 41-60 |
|---|---|---|---|---|---|
| Mechanical Appearance | 142 | 98 | 45% | 49% | 6% |
| Cartoon Appearance | 140 | 100 | 45% | 48% | 7% |
| Humanlike Appearance | 170 | 70 | 35% | 60% | 5% |
Table A 2-2 Participant Information for Study 2
| Group | Female | Male | 18-30 | 31-40 | 41-60 |
|---|---|---|---|---|---|
| Mechanical Appearance | 142 | 98 | 45% | 49% | 6% |
| Cartoon Appearance | 140 | 100 | 45% | 48% | 7% |
| Humanlike Appearance | 170 | 70 | 35% | 60% | 5% |
| Female | Male | 18-25 | 26-35 | 36-45 | 46-60 | |
|---|---|---|---|---|---|---|
| Study 3a | 90 | 60 | 21% | 59% | 13% | 7% |
| Study 3b | 178 | 122 | 38% | 46% | 15% | 1% |
Table A 2-3 Participant Information for Study 3
| Female | Male | 18-25 | 26-35 | 36-45 | 46-60 | |
|---|---|---|---|---|---|---|
| Study 3a | 90 | 60 | 21% | 59% | 13% | 7% |
| Study 3b | 178 | 122 | 38% | 46% | 15% | 1% |
| Factor | Item | Factor Loading | S.E. | p |
|---|---|---|---|---|
| F1 | ITEM1 | 0.867 | 0.021 | < 0.001 |
| ITEM2 | 0.848 | 0.023 | < 0.001 | |
| ITEM3 | 0.632 | 0.044 | < 0.001 | |
| ITEM4 | 0.828 | 0.024 | < 0.001 | |
| ITEM5 | 0.772 | 0.032 | < 0.001 | |
| ITEM6 | 0.768 | 0.029 | < 0.001 | |
| ITEM7 | 0.716 | 0.041 | < 0.001 | |
| F2 | ITEM8 | 0.746 | 0.049 | < 0.001 |
| ITEM9 | 0.731 | 0.04 | < 0.001 | |
| ITEM10 | 0.731 | 0.047 | < 0.001 | |
| ITEM11 | 0.73 | 0.046 | < 0.001 | |
| ITEM12 | 0.693 | 0.05 | < 0.001 | |
| ITEM13 | 0.652 | 0.046 | < 0.001 | |
| F3 | ITEM14 | 0.411 | 0.177 | 0.021 |
| ITEM15 | 0.337 | 0.134 | 0.012 | |
| ITEM16 | 0.361 | 0.175 | 0.039 | |
| ITEM17 | 0.334 | 0.093 | < 0.001 | |
| ITEM18 | 0.427 | 0.107 | < 0.001 | |
| ITEM19 | 0.543 | 0.163 | 0.001 |
Table A3-1 Factor Loadings of Confirmatory Factor Analysis in Study 1b
| Factor | Item | Factor Loading | S.E. | p |
|---|---|---|---|---|
| F1 | ITEM1 | 0.867 | 0.021 | < 0.001 |
| ITEM2 | 0.848 | 0.023 | < 0.001 | |
| ITEM3 | 0.632 | 0.044 | < 0.001 | |
| ITEM4 | 0.828 | 0.024 | < 0.001 | |
| ITEM5 | 0.772 | 0.032 | < 0.001 | |
| ITEM6 | 0.768 | 0.029 | < 0.001 | |
| ITEM7 | 0.716 | 0.041 | < 0.001 | |
| F2 | ITEM8 | 0.746 | 0.049 | < 0.001 |
| ITEM9 | 0.731 | 0.04 | < 0.001 | |
| ITEM10 | 0.731 | 0.047 | < 0.001 | |
| ITEM11 | 0.73 | 0.046 | < 0.001 | |
| ITEM12 | 0.693 | 0.05 | < 0.001 | |
| ITEM13 | 0.652 | 0.046 | < 0.001 | |
| F3 | ITEM14 | 0.411 | 0.177 | 0.021 |
| ITEM15 | 0.337 | 0.134 | 0.012 | |
| ITEM16 | 0.361 | 0.175 | 0.039 | |
| ITEM17 | 0.334 | 0.093 | < 0.001 | |
| ITEM18 | 0.427 | 0.107 | < 0.001 | |
| ITEM19 | 0.543 | 0.163 | 0.001 |
| [1] | Abbass, H. A., Scholz, J., & Reid, D. J. (Eds.). (2018). Foundations of trusted autonomy. Springer. |
| [2] | Akalin, N., Kiselev, A., Kristoffersson, A., & Loutfi, A. (2023). A taxonomy of factors influencing perceived safety in human-robot interaction. International Journal of Social Robotics, 15(12), 1993-2004. |
| [3] | Akalin, N., Kristoffersson, A., & Loutfi, A. (2022). Do you feel safe with your robot? Factors influencing perceived safety in human-robot interaction based on subjective and objective measures. International Journal of Human-Computer Studies, 158, 102744. |
| [4] | Akintunde, M., Yazdanpanah, V., Fathabadi, A. S., Cirstea, C., Dastani, M., & Moreau, L. (2024, May). Actual trust in multiagent systems (Extended abstract). Proceedings of the 23rd International Conference on Autonomous Agents and Multiagent Systems(AAMAS 2024) (pp.2114-2116). |
| [5] | AL-Khassawneh, Y. (2022). A review of artificial intelligence in security and privacy: Research advances, applications, opportunities, and challenges. Indonesian Journal of Science and Technology, 8(1), 79-96. |
| [6] | AWE. (2024, May 20). Industry trend report from AWE 2024: The AI revolution driving innovation in industry and the maturing smart home ecosystem. AWE China Home Appliance & Consumer Electronics Expo. https://www.awe.com.cn/contents/30/16781.html |
| [7] | Bartneck, C. (2023). Godspeed questionnaire series:Translations and usage. In C. U. Krägeloh, M. Alyami, & O. N. Medvedev (Eds.), International handbook of behavioral health assessment (pp. 1-35). Springer International Publishing. |
| [8] |
Bayne, T., Seth, A. K., Massimini, M., Shepherd, J., Cleeremans, A., Fleming, S. M., … Mudrik, L. (2024). Tests for consciousness in humans and beyond. Trends in Cognitive Sciences, 28(5), 454-466.
doi: 10.1016/j.tics.2024.01.010 pmid: 38485576 |
| [9] | Bernotat, J., Eyssel, F., & Sachse, J. (2019). The (fe)male robot: How robot body shape impacts first impressions and trust towards robots. International Journal of Social Robotics, 13(3), 477-489. |
| [10] | Biermann, H., Brauner, P., & Ziefle, M. (2021). How context and design shape human-robot trust and attributions. Paladyn, Journal of Behavioral Robotics, 12( 1), 74-86. |
| [11] | Billings, D. R., Schaefer, K. E., Llorens, N., & Hancock, P. A. (2012). What is trust? Defining the construct across domains. Poster presented at the American Psychological Association Conference. Division 21, Orlando, FL, USA, August 2012. |
| [12] | Bojić, L., Stojković, I., & Jolić Marjanović, Z. (2024). Signs of consciousness in AI: Can GPT-3 tell how smart it really is? Humanities and Social Sciences Communications, 11, 1631. |
| [13] | Brown, T. B., Mann, B., Ryder, N., Subbiah, M., Kaplan, J., Dhariwal, P., … Amodei, D. (2020). Language models are few-shot learners. Proceedings of the 34th International Conference on Neural Information Processing Systems (pp. 1877-1901). |
| [14] | Brühlmann, F., Petralito, S., Rieser, D. C., Aeschbach, L. F., & Opwis, K. (2020). TrustDiff: Development and validation of a semantic differential for user trust on the web. Journal of Usability Studies, 16(1), 29-48. |
| [15] | Burnett, C., Norman, T. J., & Sycara, K. (2011). Trust decision-making in multi-agent systems. Proceedings of the 22nd International Joint Conference on Artificial Intelligence (IJCAI-11) (pp.115-120). AAAI Press. |
| [16] | Cagiltay, B., & Mutlu, B. (2024, March). Toward family-robot interactions: A family-centered framework in HRI. Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (pp. 76-85). ACM. |
| [17] | Caine, K., Šabanovic, S., & Carter, M. (2012). The effect of monitoring by cameras and robots on the privacy enhancing behaviors of older adults. Proceedings of the seventh annual ACM/IEEE international conference on Human-Robot Interaction (pp. 343-350). ACM. |
| [18] |
Campbell, J. I., & Thompson, V. A. (2012). MorePower 6.0 for ANOVA with relational confidence intervals and Bayesian analysis. Behavior Research Methods, 44, 1255-1265.
doi: 10.3758/s13428-012-0186-0 pmid: 22437511 |
| [19] | Che, M., Lum, K. M., & Wong, Y. D. (2021). Users’ attitudes on electric scooter riding speed on shared footpath: A virtual reality study. International Journal of Sustainable Transportation, 15(2), 152-161. |
| [20] | de Visser, E. J., Peeters, M. M. M., Jung, M. F., Kohn, S., Shaw, T. H., Pak, R., & Neerincx, M. A. (2020). Towards a theory of longitudinal trust calibration in human-robot teams. International Journal of Social Robotics, 12(2), 459-478. |
| [21] | Demszky, D., Yang, D., Yeager, D. S., Bryan, C. J., Clapper, M., Chandhok, S., … Pennebaker, J. W. (2023). Using large language models in psychology. Nature Reviews Psychology, 2(11), 688-701. |
| [22] | Dikmen, M., & Burns, C. (2017). Trust in autonomous vehicles: The case of Tesla autopilot and summon. 2017 IEEE International conference on systems, man, and cybernetics (SMC) (pp. 1093-1098). IEEE. |
| [23] |
Dillion, D., Tandon, N., Gu, Y., & Gray, K. (2023). Can AI language models replace human participants? Trends in Cognitive Sciences, 27(7), 597-600.
doi: 10.1016/j.tics.2023.04.008 pmid: 37173156 |
| [24] | Fernandes, F. E., Yang, G., Do, H. M., & Sheng, W. (2016, August). Detection of privacy-sensitive situations for social robots in smart homes. 2016 IEEE International Conference on Automation Science and Engineering (CASE) (pp. 727-732). IEEE. |
| [25] | Ferrari, F., Paladino, M. P., & Jetten, J. (2016). Blurring human-machine distinctions: Anthropomorphic appearance in social robots as a threat to human distinctiveness. International Journal of Social Robotics, 8(2), 287-302. |
| [26] | Gompei, T., & Umemuro, H. (2018). Factors and development of cognitive and affective trust on social robots. Social Robotics: 10th International Conference, ICSR 2018, Qingdao, China, November 28-30. |
| [27] |
Gorsuch, R. L. (1997). Exploratory factor analysis: Its role in item analysis. Journal of Personality Assessment, 68(3), 532-560.
doi: 10.1207/s15327752jpa6803_5 pmid: 16372866 |
| [28] |
Grossmann, I., Feinberg, M., Parker, D. C., Christakis, N. A., Tetlock, P. E., & Cunningham, W. A. (2023). AI and the transformation of social science research. Science, 380(6650), 1108-1109.
doi: 10.1126/science.adi1778 pmid: 37319216 |
| [29] | Gursoy, D., Chi, O. H., Lu, L., & Nunkoo, R. (2019). Consumers acceptance of artificially intelligent (AI) device use in service delivery. International Journal of Information Management, 49, 157-169. |
| [30] | Hamid, O. H. (2023). ChatGPT and the Chinese room argument: An eloquent AI conversationalist lacking true understanding and consciousness. 2023 9th International Conference on Information Technology Trends (ITT) (pp. 238-241). |
| [31] |
Hancock, P. A., Billings, D. R., Schaefer, K. E., Chen, J. Y., de Visser, E. J., & Parasuraman, R. (2011). A meta-analysis of factors affecting trust in human-robot interaction. Human Factors, 53(5), 517-527.
pmid: 22046724 |
| [32] | Hertzog, M. A. (2008). Considerations in determining sample size for pilot studies. Research in Nursing & Health, 31(2), 180-191. |
| [33] | Ho, C.-C., & MacDorman, K. F. (2017). Measuring the uncanny valley effect. International Journal of Social Robotics, 9(1), 129-139. |
| [34] |
Hoff, K. A., & Bashir, M. (2015). Trust in automation: Integrating empirical evidence on factors that influence trust. Human Factors, 57(3), 407-434.
doi: 10.1177/0018720814547570 pmid: 25875432 |
| [35] | Hu, L., & Bentler, P. M. (1999). Cutoff criteria for fit indexes in covariance structure analysis: Conventional criteria versus new alternatives. Structural Equation Modeling: A Multidisciplinary Journal, 6(1), 1-55. |
| [36] | Jian, J.-Y., Bisantz, A. M., & Drury, C. G. (2000). Foundations for an empirically determined scale of trust in automated systems. International Journal of Cognitive Ergonomics, 4(1), 53-71. |
| [37] | Kao, Y. H., & Wang, W. J. (2015, July). Design and implementation of a family robot. 2015 12th International Joint Conference on Computer Science and Software Engineering (pp. 251-256). IEEE. |
| [38] | King, E., Yu, H., Lee, S., & Julien, C. (2023). Get ready for a party: Exploring smarter smart spaces with help from large language models. arXiv:2303.14143 |
| [39] | Klein, R. (2007). Internet-based patient-physician electronic communication applications: Patient acceptance and trust. E-Service Journal, 5(2), 27-52. |
| [40] | Kundu, S. (2023). Measuring trustworthiness is crucial for medical AI tools. Nature Humman Behaviour, 7(11), 1812-1813. |
| [41] | Lee, I. (2021). Service robots: A systematic literature review. Electronics, 10(21), 2658. |
| [42] |
Lee, J., & Moray, N. (1992). Trust, control strategies and allocation of function in human-machine systems. Ergonomics, 35(10), 1243-1270.
doi: 10.1080/00140139208967392 pmid: 1516577 |
| [43] |
Lee, J. D., & See, K. A. (2004). Trust in automation: Designing for appropriate reliance. Human Factors, 46(1), 50-80.
doi: 10.1518/hfes.46.1.50_30392 pmid: 15151155 |
| [44] | Lewis, P. R., & Marsh, S. (2022). What is it like to trust a rock? A functionalist perspective on trust and trustworthiness in artificial intelligence. Cognitive Systems Research, 72, 33-49. |
| [45] | Leyzberg, D., Spaulding, S., & Scassellati, B. (2014, March). Personalizing robot tutors to individuals' learning differences. Proceedings of the 2014 ACM/IEEE international conference on Human-robot interaction (pp. 423-430). |
| [46] | Li, C., & Qi, Y. (2025). Toward accurate psychological simulations: Investigating LLMs’ responses to personality and cultural variables. Computers in Human Behavior, 170, 108687. |
| [47] | Li, Y., Huang, Y., Lin, Y., Wu, S., Wan, Y., & Sun, L. (2024). I think, therefore I am: Benchmarking awareness of large language models Using AwareBench. arXiv:2401.17882 |
| [48] | Lin, P.-H., & Chen, W.-H. (2022). Factors That influence consumers’ sustainable apparel purchase intention: The moderating effect of generational cohorts. Sustainability, 14(14), 8950. |
| [49] | Liu, Y., Li, S., Liu, Y., Wang, Y., Ren, S., Li, L., … Hou, L. (2024). TempCompass: Do video LLMs really understand videos? arXiv:2403.00476 |
| [50] | Ma, Y., Li, S., Qin, S., & Qi, Y. (2020). Factors affecting trust in the autonomous vehicle: A survey of primary school students and parent perceptions. 2020 IEEE 19th International Conference on Trust, Security and Privacy in Computing and Communications (TrustCom) (TrustCom), (pp.2020-2027). |
| [51] | Madhavan, P., & Wiegmann, D. A. (2007). Similarities and differences between human-human and human-automation trust: An integrative review. Theoretical Issues in Ergonomics Science, 8(4), 277-301. |
| [52] | Malle, B. F., & Ullman, D. (2021). A multidimensional conception and measure of human-robot trust. In C. S. Nam & J. B. Lyons (Eds.), Trust in Human-Robot Interaction (pp. 3-25). Elsevier Academic Press. |
| [53] | Marcu, G., Lin, I., Williams, B., Robert, L. P., & Schaub, F. (2023). “Would I feel more secure with a robot?”: Understanding perceptions of security robots in public spaces. Proceedings of the ACM on Human-Computer Interaction, 7(CSCW2), 322:1-322:34. |
| [54] | Marsh, H. W., Hau, K.-T., & Wen, Z. (2004). In search of golden rules: Comment on hypothesis-testing approaches to setting cutoff values for fit indexes and dangers in overgeneralizing Hu and Bentler’s (1999) findings. Structural Equation Modeling: A Multidisciplinary Journal, 11(3), 320-341. |
| [55] | Mayer, R. C., Davis, J. H., & Schoorman, F. D. (1995). An integrative model of organizational trust. Academy of Management Review, 20(3), 709-734. |
| [56] | Mei, Q., Xie, Y., Yuan, W., & Jackson, M. O. (2024). A Turing test of whether AI chatbots are behaviorally similar to humans. Proceedings of the National Academy of Sciences, 121(9), e2313925121. |
| [57] | Meng, J. (2024). AI emerges as the frontier in behavioral science. Proceedings of the National Academy of Sciences, 121(10), e2401336121. |
| [58] | Miao, R., Jia, Q., Sun, F., Chen, G., & Huang, H. (2024). Hierarchical understanding in robotic manipulation: A knowledge-based framework. Actuators, 13(1), 28. |
| [59] | Milliez, G. (2018). Buddy:A companion robot for the whole family. Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, 40. |
| [60] | Mori, M. (1970). Bukimi no tani (the uncanny valley). Energy, 7(4), 33-35. |
| [61] | Mou, X., Ding, X., He, Q., Wang, L., Liang, J., Zhang, X., Sun, L., Lin, J., Zhou, J., Huang, X., & Wei, Z. (2024). From individual to society: A survey on social simulation driven by large language model-based agents. arXiv:2412.03563 |
| [62] |
Muir, B. M., & Moray, N. (1996). Trust in automation: II. Experimental studies of trust and human intervention in a process control simulation. Ergonomics, 39(3), 429-460.
pmid: 8849495 |
| [63] | Nass, C., Moon, Y., Fogg, B. J., Reeves, B., & Dryer, D. C. (1995). Can computer personalities be human personalities? International Journal of Human-Computer Studies, 43(2), 223-239. |
| [64] | Natarajan, M., & Gombolay, M. (2020, March). Effects of anthropomorphism and accountability on trust in human robot interaction. Proceedings of the 2020 ACM/IEEE international conference on human-robot interaction (pp. 33-42). |
| [65] | Nawaz, N. (2019). Robotic process automation for recruitment process. International Journal of Advanced Research in Engineering & Technology, 10(2), 608-611. |
| [66] | Nilsson, N. J. (1997). Artificial intelligence: A new synthesis. Morgan Kaufmann. |
| [67] |
Podsakoff, P. M., MacKenzie, S. B., Lee, J. Y., & Podsakoff, N. P. (2003). Common method biases in behavioral research: A critical review of the literature and recommended remedies. Journal of Applied Psychology, 88(5), 879-903.
doi: 10.1037/0021-9010.88.5.879 pmid: 14516251 |
| [68] | Prakash, A., Kemp, C. C., & Rogers, W. A. (2014, March). Older adults' reactions to a robot's appearance in the context of home use. Proceedings of the 2014 ACM/IEEE international conference on Human-robot interaction (pp. 268-269). |
| [69] | Prassler, E., Munich, M. E., Pirjanian, P., & Kosuge, K. (2016). Domestic robotics. In B. Siciliano & O. Khatib (Eds.), Springer handbook of robotics (pp. 1729-1758). Springer International Publishing. |
| [70] |
Qi, Y., Chen, J., Qin, S., & Du, F. (2024). Human-AI mutual trust in the era of artificial general intelligence. Advances in Psychological Science, 32(12), 2124-2136.
doi: 10.3724/SP.J.1042.2024.02124 |
| [71] | Ramchurn, S. D., Huynh, D., & Jennings, N. R. (2004). Trust in multi-agent systems. The Knowledge Engineering Review, 19(1), 1-25. |
| [72] | Rane, P., Mhatre, V., & Kurup, L. (2014). Study of a home robot: JIBO. International Journal of Engineering Research & Technology, 3(10), 490-493. |
| [73] | Robinette, P., Howard, A. M., & Wagner, A. R. (2017). Effect of robot performance on human-robot trust in time-critical situations. IEEE Transactions on Human-Machine Systems, 47(4), 425-436. |
| [74] |
Sanders, T., Kaplan, A., Koch, R., Schwartz, M., & Hancock, P. A. (2019). The relationship between trust and use choice in human-robot interaction. Human Factors, 61(4), 614-626.
doi: 10.1177/0018720818816838 pmid: 30601683 |
| [75] | Sartori, G., & Orrù, G. (2023). Language models and psychological sciences. Frontiers in Psychology, 14, 1279317. |
| [76] | Schaefer, K. E. (2016). Measuring trust in human robot interactions:Development of the “Trust Perception Scale-HRI”. In Mittu, R., Sofge, D., Wagner, A., Lawless, W. (Eds.), Robust Intelligence and Trust in Autonomous Systems (pp. 191-218). Springer, Boston, MA. |
| [77] | Schulz, T., & Herstad, J. (2017). Walking away from the robot: Negotiating privacy with a robot. Proceedings of the 31st International BCS Human Computer Interaction Conference (pp.1-6). ACM. |
| [78] | Shanahan, M., McDonell, K., & Reynolds, L. (2023). Role play with large language models. Nature, 623(7987), 493-498. |
| [79] | Shao, Y., Li, L., Dai, J., & Qiu, X. (2023). Character-LLM:A trainable agent for role-playing. Proceedings of the 2023 Conference on Empirical Methods in Natural Language Processing (pp. 13153-13187). |
| [80] | Söderlund, M. (2023). Service robots and artificial morality: An examination of robot behavior that violates human privacy. Journal of Service Theory and Practice, 33(7), 52-72. |
| [81] | Song, B., Zhu, Q., & Luo, J. (2024). Human-AI collaboration by design. Proceedings of the Design Society, 4, 2247-2256. |
| [82] | Srinivasan, S. S., Alshareef, A., Hwang, A. V., Kang, Z., Kuosmanen, J., Ishida, K.,... Traverso, G. (2022). RoboCap: Robotic mucus-clearing capsule for enhanced drug delivery in the gastrointestinal tract. Science Robotics, 7(70), eabp9066. |
| [83] |
Steiger, J. H. (1990). Structural model evaluation and modification: An interval estimation approach. Multivariate Behavioral Research, 25(2), 173-180.
doi: 10.1207/s15327906mbr2502_4 pmid: 26794479 |
| [84] | Sun, X., Zhang, Y., Hou, L., Zhou, W., & Zhang, S. (2020). Review on artificial intelligence products and service system. Packaging Engineering, 41(10), 49-61. |
| [85] | Sundar, S. S., & Nass, C. (2000). Source orientation in human-computer interaction: Programmer, networker or independent social actor? Communication Research, 27(6), 683-703. |
| [86] | Sviestins, E., Mitsunaga, N., Kanda, T., Ishiguro, H., & Hagita, N. (2007). Speed adaptation for a robot walking with a human. Proceedings of the ACM/IEEE international conference on Human-robot interaction (pp. 349-356). |
| [87] | Torre, I., Carrigan, E., McDonnell, R., Domijan, K., McCabe, K., & Harte, N. (2019, October). The effect of multimodal emotional expression and agent appearance on trust in human-agent interaction. Proceedings of the 12th ACM SIGGRAPH Conference on Motion, Interaction and Games (pp. 1-6). |
| [88] | Tsui, K. M., Desai, M., & Yanco, H. A. (2010, March). Considering the bystander's perspective for indirect human-robot interaction. 2010 5th ACM/IEEE International Conference on Human-Robot Interaction (HRI). (pp. 129-130). |
| [89] | Walters, M. L., Koay, K. L., Syrdal, D. S., Dautenhahn, K., & Te Boekhorst, R. (2009). Preferences and perceptions of robot appearance and embodiment in human-robot interaction trials. Procs of New Frontiers in Human-Robot Interaction: Symposium at AISB09 Convention. (pp136-143) |
| [90] | Wan, J., Tang, S., Yan, H., Li, D., Wang, S., & Vasilakos, A. V. (2016). Cloud robotics: Current status and open issues. IEEE Access, 4, 2797-2807. |
| [91] |
Wang, C., Chen, W. C., Huang, L., Hou, S. Y., & Wang, Y. W. (2024). Robots abide by ethical principles promote human-robot trust? The reverse effect of decision types and the human-robot projection hypothesis. Acta Psychologica Sinica, 56(2), 194-209.
doi: 10.3724/SP.J.1041.2024.00194 |
| [92] | Wang, K., Wu, J., Sun, Y., Chen, J., Pu, Y., & Qi, Y. (2024). Trust in human and virtual live streamers: The role of integrity and social presence. International Journal of Human-Computer Interaction, 40(23), 8274-8294. |
| [93] | Webb, T., Holyoak, K. J., & Lu, H. (2023). Emergent analogical reasoning in large language models. Nature Human Behaviour, 7(9), 1526-1541. |
| [94] | Xie, C., Chen, C., Jia, F., Ye, Z., Shu, K., Bibi, A., … Li, G. (2024). Can large language model agents simulate human trust behaviors? arXiv:2402.04559 |
| [95] |
Xie, Y., & Zhou, R. (2025). The bidirectional trust in the context of new human-machine relationships. Advances in Psychological Science, 33(6), 916-932.
doi: 10.3724/SP.J.1042.2025.0916 |
| [96] | Xu, R., Sun, Y., Ren, M., Guo, S., Pan, R., Lin, H., Sun, L., & Han, X. (2024). AI for social science and social science of AI: A survey. Information Processing and Management, 61(3), 103665. |
| [97] |
Xu, W., Gao, Z. F., & Ge, L. Z. (2024). New research paradigms and agenda of human factors science in the intelligence era. Acta Psychologica Sinica, 56(3), 363-382.
doi: 10.3724/SP.J.1041.2024.00363 |
| [98] |
Xu, W., & Ge, L. Z. (2020). Engineering psychology in the era of artificial intelligence. Advances in Psychological Science, 28(9), 1409-1425.
doi: 10.3724/SP.J.1042.2020.01409 |
| [99] | Yonekura, H., Tanaka, F., Mizumoto, T., & Yamaguchi, H. (2024). Generating human daily activities with LLM for smart home simulator agents. 2024 International Conference on Intelligent Environments (IE), (pp. 93-96). |
| [100] | You, S., & Robert Jr, L. P. (2018, February). Human-robot similarity and willingness to work with a robotic co-worker. Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (pp. 251-260). |
| [101] | Zacharaki, A., Kostavelis, I., Gasteratos, A., & Dokas, I. (2020). Safety bounds in human robot interaction: A survey. Safety Science, 127, 104667. |
| [102] | Zhang, G., Chong, L., Kotovsky, K., & Cagan, J. (2023). Trust in an AI versus a human teammate: The effects of teammate identity and performance on Human-AI cooperation. Computers in Human Behavior, 139, 107536. |
| [103] | Zhang, J., Li, S., Zhang, J., Du, F., Qi, Y., & Liu, X. (2020). A literature review of the research on the uncanny valley. In: Rau, P. L. (Ed.), Cross-cultural design. User experience of products, services, and intelligent environments (Lecture notes in computer science, Vol 12192). Springer. |
| [104] | Zou, H., Wang, P., Yan, Z., Sun, T., & Xiao, Z. (2024). Can LLM “self-report”? Evaluating the validity of self-report scales in measuring personality design in LLM-based Chatbots. arXiv:2412.00207 |
| [1] | TANG Xiaofei, WANG Changmei, SUN Xiaodong, CHANG En-Chung. Impact of trusting humanoid intelligent robots on employees’ job dedication intentions: An investigation based on the classification of human−robot trust [J]. Acta Psychologica Sinica, 2025, 57(11): 1933-1950. |
| [2] | ZHAN Peida; BIAN Yufang; WANG Lijun. Factors affecting the classification accuracy of reparametrized diagnostic classification models for expert-defined polytomous attributes [J]. Acta Psychologica Sinica, 2016, 48(3): 318-330. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||